ORB-SLAM2在jetson nano上运行的问题
-
在机器人上运行orb-slam2,由于机器人使用wsl+ssh远程连接,所以没有图形显示界面,从github上下载了一个不依赖Pangolin的orb跑ros,但在运行中总是出现
warining:"camera_link" passed to lookupTransform argument target_frame does not exist.和Could not find a connection between 'camera_link' and 'base_link' because they are not part of the same tree.Tf has two or more unconnected trees的问题,查阅TF树发现base_link和camera_link没有连在一起,请问该如何解决,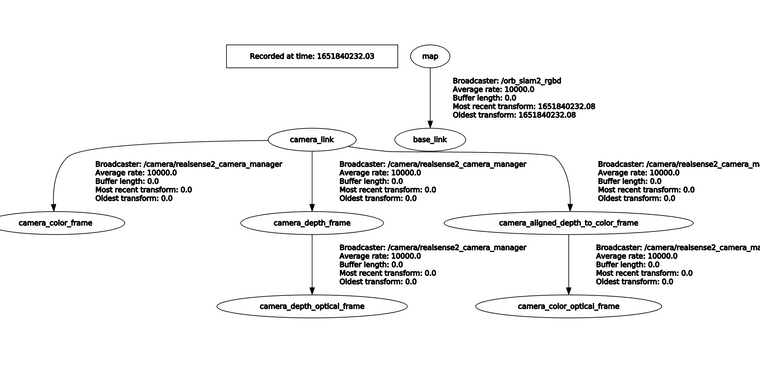
-
@765485764 你可以手动发布一下base_link和camera_link之间的关系。
三种方式请参考:https://blog.csdn.net/qq_14977553/article/details/108888782
-
 小 小鱼 将这个主题标记为已解决,在
小 小鱼 将这个主题标记为已解决,在