[FishBotCamera]2.驱动FishBotCamera并尝试调整参数
-
@pengzhju 网络没有通
-
@小鱼 小鱼,网络要怎么设置啊?不清楚这一块内容
-
@pengzhju 先确定WIFI名字密码对不对,再确认是不是2.4G网络,再确认camera有没有链接成功wifi,再确定路由器支不支持多播(用于自动发现)
-
 鱼哥,请问我的rqt打开怎么是这样的,我有正常帧率返回
鱼哥,请问我的rqt打开怎么是这样的,我有正常帧率返回 -
@2290305520 点 plugins/最后一个/找到image_view
-
请问小鱼,相机在RVIZ2中成像是上下倒像,在rqt中可任意调整,rviz中一直是倒像,这是咋回事?
-
@2062545974 tf原因吧
-
@2062545974 调整调整参数看看
-
此回复已被删除! -
@小鱼 请问摄像模组的视角范围是多少度的?是不是使用不同的framesize,视角的角度范围也不同?
-
@Gerry 图片更大了相当于
-
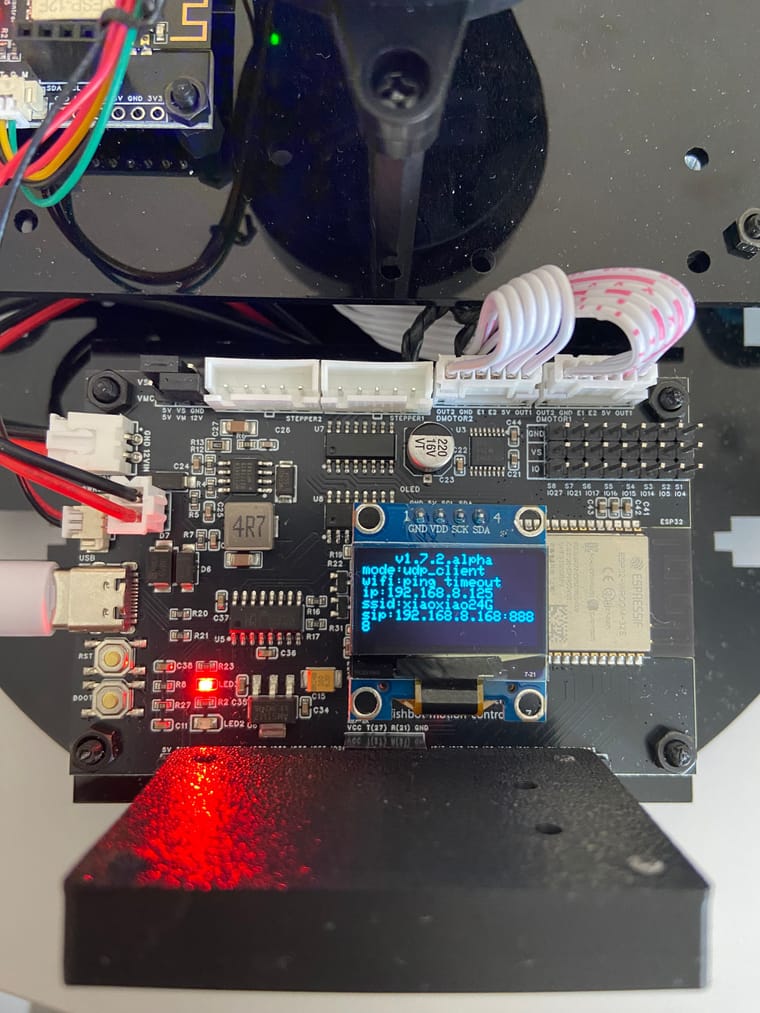
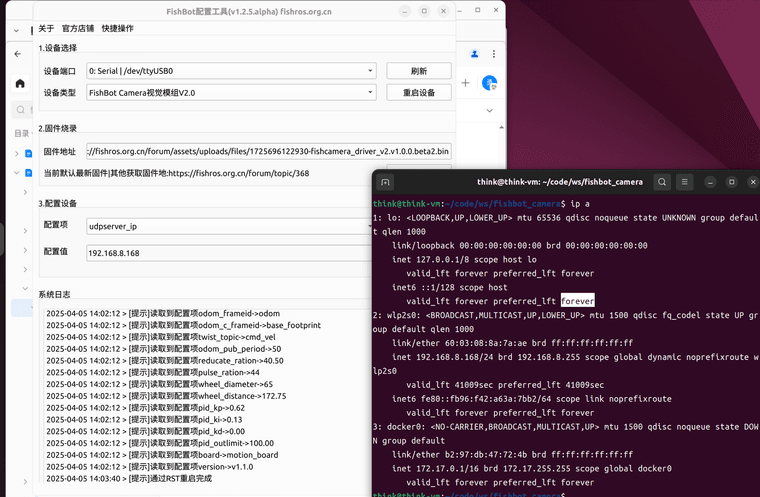
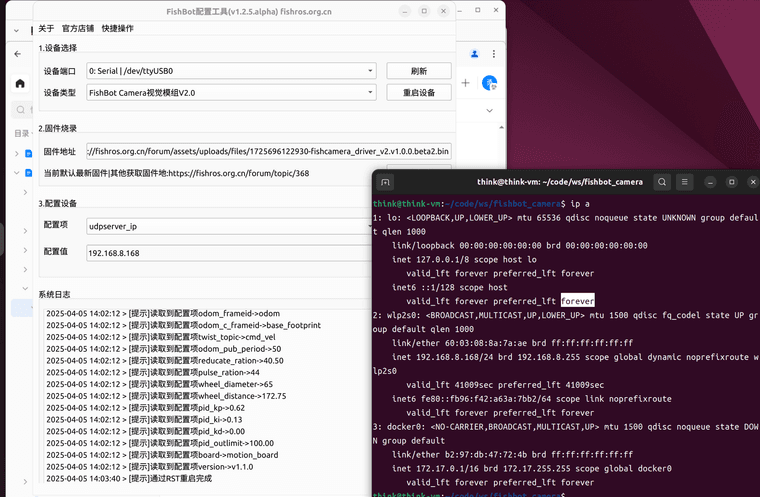
操作过程如上图所示
1)数据线一端连接视觉模组的type c口,一端连接电脑,进行固件烧录,成功;配置网络ssid等失败
2)数据线一端连接主控板的type c口,一端连接电脑,选择视觉模组,配置2.4g网络,ip等成功。
3)插入视觉模组针孔如图所示(担心是否没有插入到底部?有一排针阻挡插入)
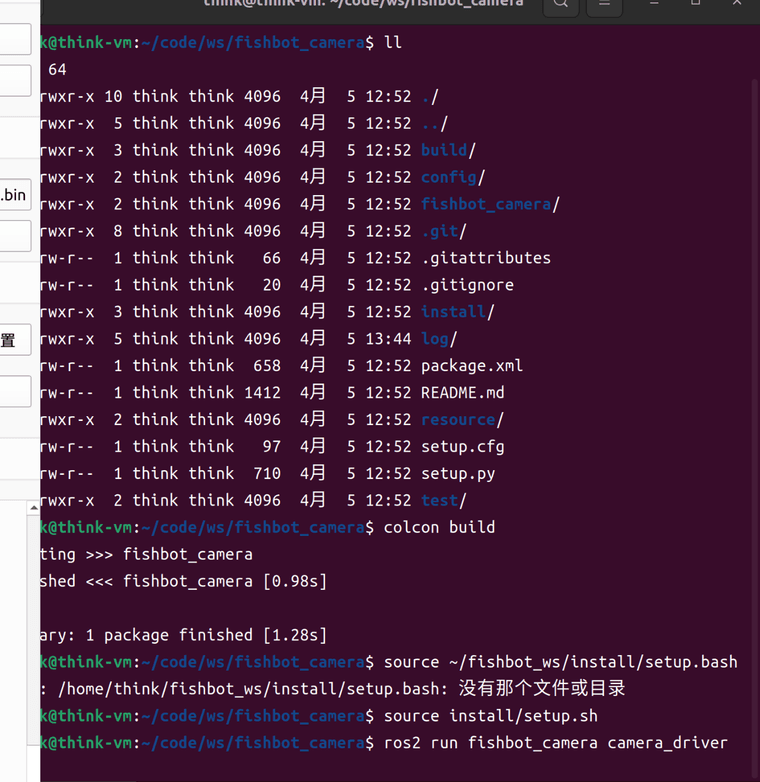
4)按照教程下载代码,编译,执行命令 ros2 run fishbot_camera camera_driver
卡住了,没有帧率输出
系统:ubuntu 22.04,物理机,非虚拟机需要解决的问题有两个
1)执行命令 ros2 run fishbot_camera camera_driver ,没有帧率输出
2)视觉模组比较烫,不清楚怎么回事 -
@think 插在视觉模组上,而不是主控板上进行配置,如果是很烫,考虑烧掉了
-
@小鱼 插入视觉模组c口,看见灯是红色的,写入固件,写入100%失败。
这个状况一定是烧毁了么?正常是绿色灯么?如果烧了,顺便问下,有质保么?谢谢
-
@think 看到你读取出来的配置是主控板的,有没有插错口
-
帧率太低啦啊,不知道是什么原因,有时候正常,有时候帧率很低,我用路由器搭建的网络。
 @小鱼
@小鱼 -
@zxcpjp 分辨率低一些,坚持下网络延迟
-
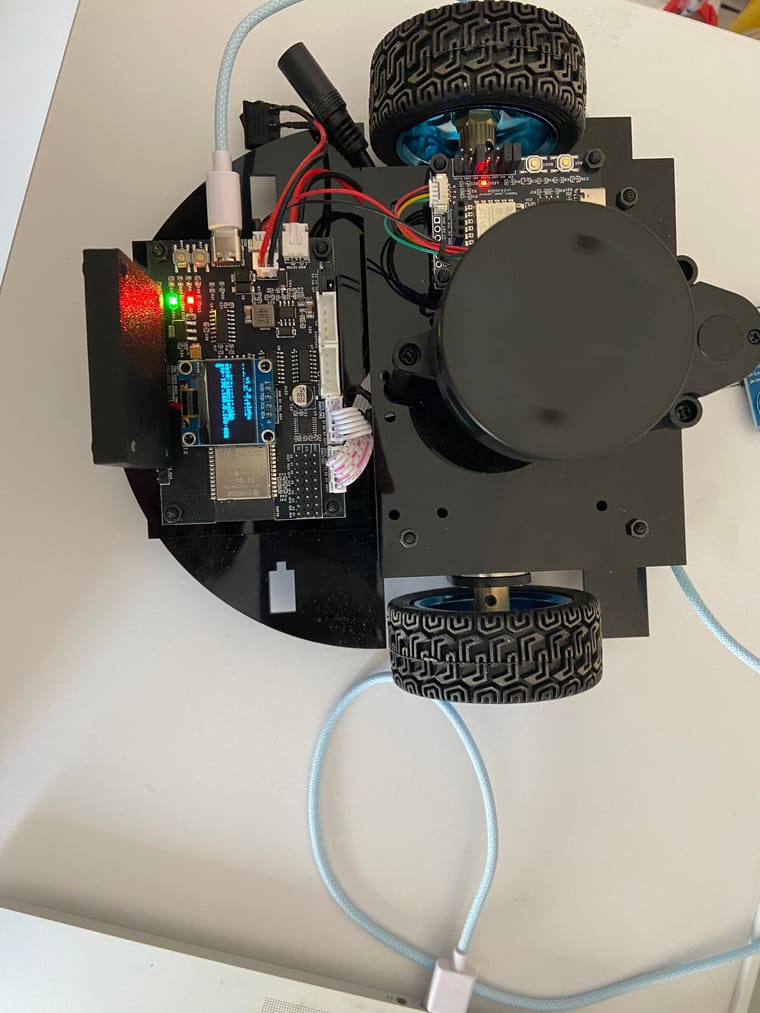
摄像头和超声波共用一个位置,只是用一下电源吧?
-
小鱼老师,请问人脸检测 face_detect开关打开后有什么效果吗?我这好像没看出有什么变化。
-
@ros2_fresh 会有眼睛鼻子嘴巴的点显示出来