如何将Moveit2官网教程中panda机械臂的命令接口,从'position'正确地为'velocity'?
-
我跟随Moveit2官网创建了panda机械臂,并成功运行了
demo.launch.py:MoveIt Setup Assistant — MoveIt Documentation: Rolling documentation
我想将教程熊猫机械臂命令接口从'position'更改为'velocity'。
我更改了两个文件:
- ros2_controllers.yaml
- panda.ros2_control.xacro
更改后,运行以下命令启动程序:
colcon build
ros2 launch panda_moveit_config demo.launch.py这时RViz 展示了正确的计划轨迹
但是完成计划后并单击“ Execute”按钮时,rviz中机械臂没有相应的动作(只有之前点击“Plan”后出现的计划轨迹)
我的更改内容是否有问题?或者说正确的更改是什么?
以下是控制台输出,以及我更改的两个文件:
控制台输出:
[rviz2-4] [INFO] [1713256529.569964067] [move_group_interface]: MoveGroup action client/server ready [move_group-3] [INFO] [1713256529.570737967] [moveit_move_group_default_capabilities.move_action_capability]: Received request [move_group-3] [INFO] [1713256529.570926767] [moveit_move_group_default_capabilities.move_action_capability]: executing.. [rviz2-4] [INFO] [1713256529.571154567] [move_group_interface]: Planning request accepted [move_group-3] [INFO] [1713256529.579226867] [moveit_move_group_default_capabilities.move_action_capability]: Planning request received for MoveGroup action. Forwarding to planning pipeline. [move_group-3] [INFO] [1713256529.579303767] [moveit_move_group_capabilities_base.move_group_capability]: Using planning pipeline 'ompl' [move_group-3] [INFO] [1713256529.579782367] [moveit.ompl_planning.model_based_planning_context]: Planner configuration 'robot_arm' will use planner 'geometric::RRTConnect'. Additional configuration parameters will be set when the planner is constructed. [move_group-3] [INFO] [1713256529.634432567] [moveit_move_group_default_capabilities.move_action_capability]: Motion plan was computed successfully. [rviz2-4] [INFO] [1713256529.635581867] [move_group_interface]: Planning request complete! [rviz2-4] [INFO] [1713256529.635675367] [move_group_interface]: time taken to generate plan: 0.0163399 seconds [move_group-3] [INFO] [1713256535.657329254] [moveit_move_group_default_capabilities.execute_trajectory_action_capability]: Received goal request [move_group-3] [INFO] [1713256535.657736354] [moveit_move_group_default_capabilities.execute_trajectory_action_capability]: Execution request received [move_group-3] [INFO] [1713256535.657824254] [moveit.plugins.moveit_simple_controller_manager]: Returned 2 controllers in list [move_group-3] [INFO] [1713256535.657872854] [moveit.plugins.moveit_simple_controller_manager]: Returned 2 controllers in list [move_group-3] [INFO] [1713256535.658506454] [moveit_ros.trajectory_execution_manager]: Validating trajectory with allowed_start_tolerance 0.01 [rviz2-4] [INFO] [1713256535.658094154] [move_group_interface]: Execute request accepted [move_group-3] [INFO] [1713256535.660050654] [moveit_ros.trajectory_execution_manager]: Starting trajectory execution ... [move_group-3] [INFO] [1713256535.660163154] [moveit.plugins.moveit_simple_controller_manager]: Returned 2 controllers in list [move_group-3] [INFO] [1713256535.660240354] [moveit.plugins.moveit_simple_controller_manager]: Returned 2 controllers in list [move_group-3] [INFO] [1713256535.660452454] [moveit.simple_controller_manager.follow_joint_trajectory_controller_handle]: sending trajectory to robot_arm_controller [ros2_control_node-5] [INFO] [1713256535.660962554] [robot_arm_controller]: Received new action goal [ros2_control_node-5] [INFO] [1713256535.661051554] [robot_arm_controller]: Accepted new action goal [move_group-3] [INFO] [1713256535.661379754] [moveit.simple_controller_manager.follow_joint_trajectory_controller_handle]: robot_arm_controller started execution [move_group-3] [INFO] [1713256535.661414754] [moveit.simple_controller_manager.follow_joint_trajectory_controller_handle]: Goal request accepted! [ros2_control_node-5] [INFO] [1713256545.758803767] [robot_arm_controller]: Goal reached, success! [move_group-3] [INFO] [1713256545.761655467] [moveit.simple_controller_manager.follow_joint_trajectory_controller_handle]: Controller 'robot_arm_controller' successfully finished [move_group-3] [INFO] [1713256545.789580068] [moveit_ros.trajectory_execution_manager]: Completed trajectory execution with status SUCCEEDED ... [move_group-3] [INFO] [1713256545.789703768] [moveit_move_group_default_capabilities.execute_trajectory_action_capability]: Execution completed: SUCCEEDED [rviz2-4] [INFO] [1713256545.790211768] [move_group_interface]: Execute request success!更改的文件:
- ros2_controllers.yaml:
# This config file is used by ros2_control controller_manager: ros__parameters: update_rate: 100 # Hz robot_arm_controller: type: joint_trajectory_controller/JointTrajectoryController robot_hand_controller: type: position_controllers/GripperActionController joint_state_broadcaster: type: joint_state_broadcaster/JointStateBroadcaster robot_arm_controller: ros__parameters: joints: - panda_joint1 - panda_joint2 - panda_joint3 - panda_joint4 - panda_joint5 - panda_joint6 - panda_joint7 command_interfaces: # - position # changed: - velocity state_interfaces: - position - velocity robot_hand_controller: ros__parameters: joint: panda_finger_joint1- panda.ros2_control.xacro
<?xml version="1.0"?> <robot xmlns:xacro="http://www.ros.org/wiki/xacro"> <xacro:macro name="panda_ros2_control" params="name initial_positions_file"> <xacro:property name="initial_positions" value="${load_yaml(initial_positions_file)['initial_positions']}"/> <ros2_control name="${name}" type="system"> <hardware> <!-- By default, set up controllers for simulation. This won't work on real hardware --> <plugin>mock_components/GenericSystem</plugin> </hardware> <joint name="panda_joint1"> <!-- changed --> <command_interface name="velocity"/> <!-- position --> <state_interface name="position"> <param name="initial_value">${initial_positions['panda_joint1']}</param> </state_interface> <state_interface name="velocity"/> </joint> <joint name="panda_joint2"> <!-- changed --> <command_interface name="velocity"/> <!-- position --> <state_interface name="position"> <param name="initial_value">${initial_positions['panda_joint2']}</param> </state_interface> <state_interface name="velocity"/> </joint> <joint name="panda_joint3"> <!-- changed --> <command_interface name="velocity"/> <!-- position --> <state_interface name="position"> <param name="initial_value">${initial_positions['panda_joint3']}</param> </state_interface> <state_interface name="velocity"/> </joint> <joint name="panda_joint4"> <!-- changed --> <command_interface name="velocity"/> <!-- position --> <state_interface name="position"> <param name="initial_value">${initial_positions['panda_joint4']}</param> </state_interface> <state_interface name="velocity"/> </joint> <joint name="panda_joint5"> <!-- changed --> <command_interface name="velocity"/> <!-- position --> <state_interface name="position"> <param name="initial_value">${initial_positions['panda_joint5']}</param> </state_interface> <state_interface name="velocity"/> </joint> <joint name="panda_joint6"> <!-- changed --> <command_interface name="velocity"/> <!-- position --> <state_interface name="position"> <param name="initial_value">${initial_positions['panda_joint6']}</param> </state_interface> <state_interface name="velocity"/> </joint> <joint name="panda_joint7"> <!-- changed --> <command_interface name="velocity"/> <!-- position --> <state_interface name="position"> <param name="initial_value">${initial_positions['panda_joint7']}</param> </state_interface> <state_interface name="velocity"/> </joint> <joint name="panda_finger_joint1"> <command_interface name="position"/> <state_interface name="position"> <param name="initial_value">${initial_positions['panda_finger_joint1']}</param> </state_interface> <state_interface name="velocity"/> </joint> </ros2_control> </xacro:macro> </robot> -
@437985437 1.感觉是执行部分问题 2.查看下action的客户端和服务端,看看是否连接在一起
-
@小鱼
补充:
rqt_graph的结果如下:
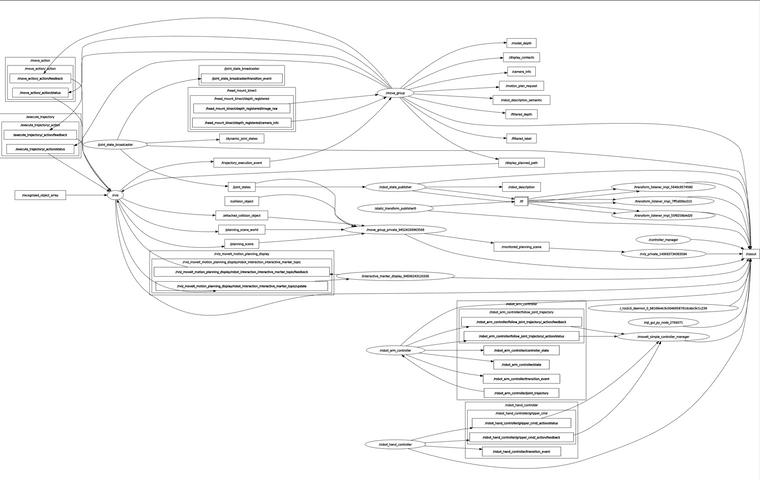
action的情况:
命令:
ros2 action info /robot_arm_controller/follow_joint_trajectory
响应:Action: /robot_arm_controller/follow_joint_trajectory Action clients: 1 /moveit_simple_controller_manager Action servers: 1 /robot_arm_controller -
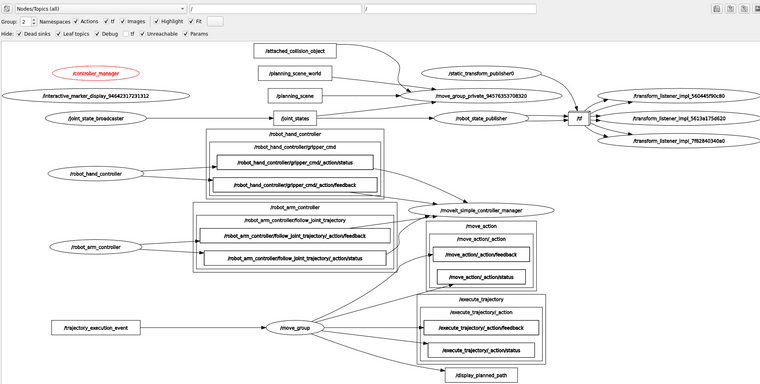
@437985437
图片有些模糊,再补充一下:
-
问题解决了,是ros2 control官方提供的硬件组件“mock_components/GenericSystem”的问题。
我实现了一个新的硬件组件,仅将速度命令接口的值写入到速度状态接口,将位置命令接口的值写入为:
position += velocity * period。然后可以正常通过 速度命令接口 来接入到 Moveit2 中,并规划机械臂位姿。
还有疑惑的地方是,这个组件真的不支持速度命令接口吗?我没有在官网找到相关的内容。鱼大佬@小鱼 对这个有研究吗?
官网文档:
Mock Components — ROS2_Control: Humble Apr 2024 documentation -
@437985437 暂时没有研究哈,蹲下一位大佬