《动手学Moveit2》2.Moveit2介绍
-
2.Moveit2介绍
MoveIt2是基于ROS2的机器人操作平台,其集成了运动规划,操作,3D感知,运动学,控制和导航方面的最新技术与一体。
架构介绍
接着我们来简单看下Moveit2的框架如图2-1所示
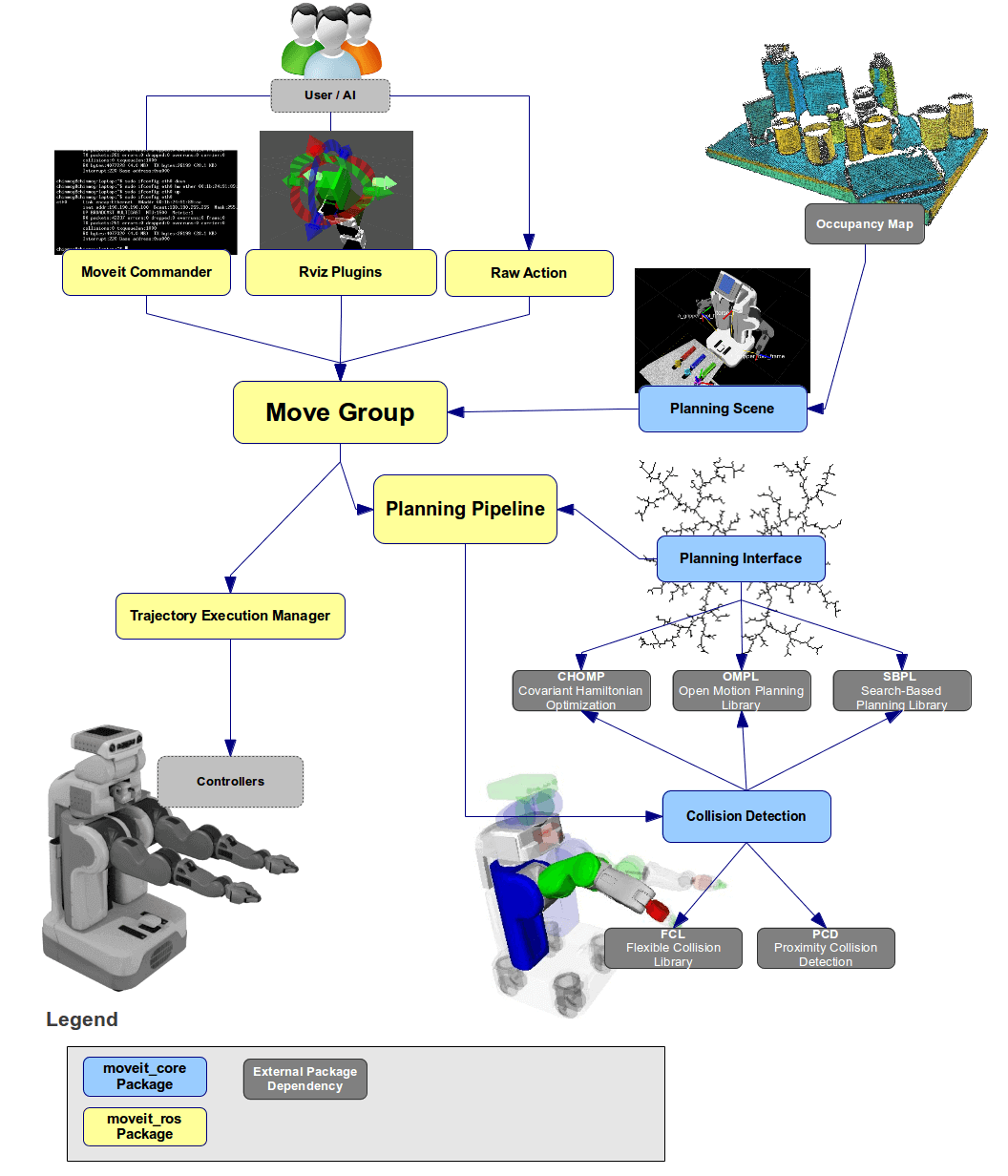
简单的可以将图2-1拆分为以下几个部分:
graph LR 环境信息--地图等-->B A[控制接口]--指令-->B[规划流水线] B--运动轨迹-->D[轨迹执行管理器] D-->机械臂其中规划流水线,通过调用规划接口产生轨迹,之后进行碰撞检测,若不通过则继续规划,直到产生一条无碰撞的轨迹。
规划接口
Moveit2提供三个默认的规划流水线的实现。
- 基于开源运动规划库的规划器OMPL
- 基于搜索的规划器SBPL
- 基于梯度轨迹优化的协变哈密顿量优化规划器CHOMP
碰撞检测
Moveit2提供了两种实现
- 基于FCL库实现的碰撞检测。
- 源码中没看到PCD,只看到了Bullet碰撞检测,这个图值得怀疑,就无展开了,怕大家误会。
-
Y young 在 中固定了该主题