新买的二驱小车, 通过micro ros agent连接电脑后,ros2 node list没有对于node
-
硬件环境是x86-64的物理机,ubuntu22,ros2 humble
代码来自于https://github.com/fishros/fishbot_motion_control_microros.git
但是默认情况下编译报错,修改micro_ros_platformio的git地址,可以正常编译,烧写
lib_deps =
; https://github.com/micro-ROS/micro_ros_platformio#main
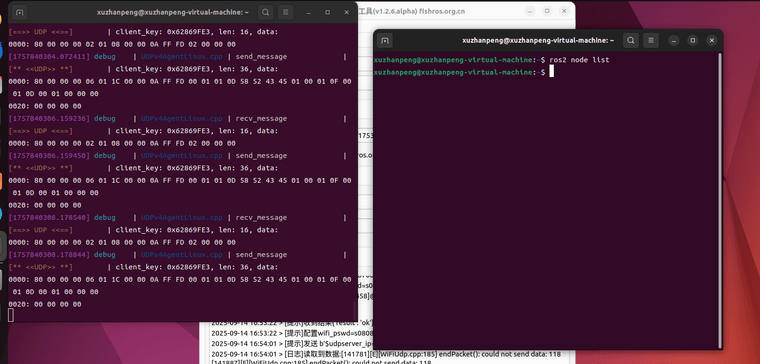
https://gitee.com/ohhuo/micro_ros_platformio.git通过docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6启动后,有大量日志输出
[1741241003.186936] debug | UDPv4AgentLinux.cpp | recv_message | [==>> UDP <<==] | client_key: 0x69AE27AA, len: 324, data:
0000: 81 01 75 03 07 01 3C 01 03 8C 00 15 AB 3A C9 67 40 C5 4F 0A 04 00 00 00 69 6D 75 00 00 00 00 80
。。。
[1741241003.187025] debug | DataWriter.cpp | write | [** <<DDS>> **] | client_key: 0x00000001, len: 312, data:
0000: AB 3A C9 67 40 C5 4F 0A 04 00 00 00 69 6D 75 00 00 00 00 80 14 26 56 3F 00 00 00 20 5A 6A 32 3F
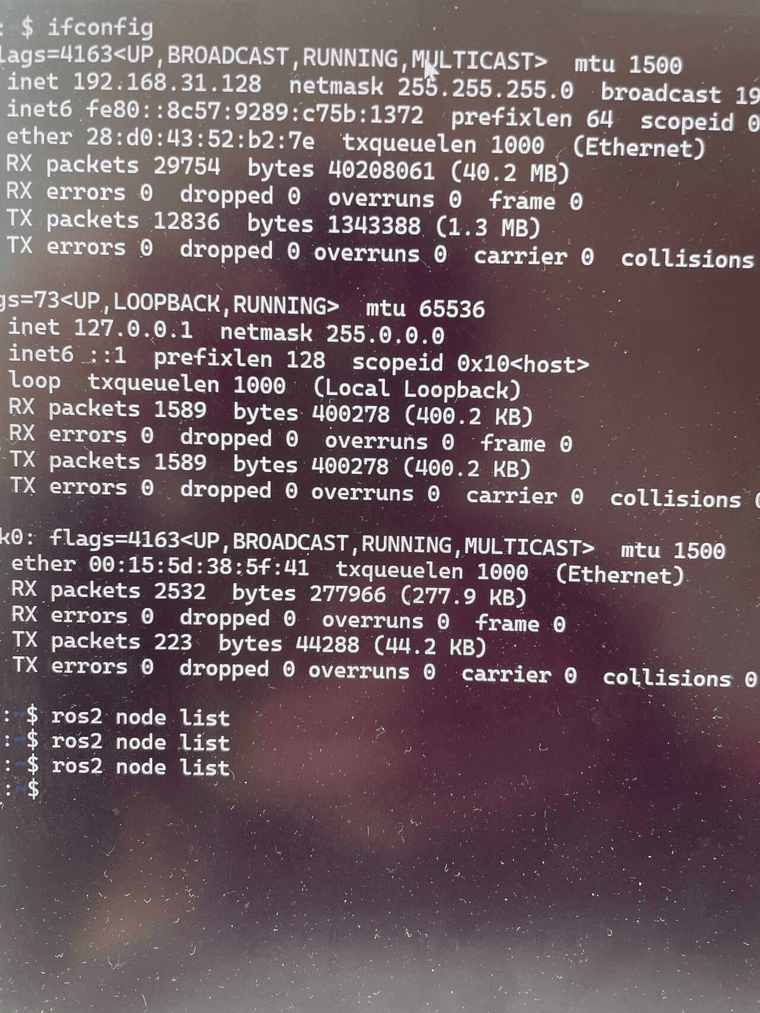
0020: 00 00 00 40 87 34 CC BF 00在ubuntu上ros2 node list没有任何输出
-
针对你提到的问题,我们可以从几个方面进行排查和解决:
-
确保Micro-ROS Agent与ROS 2节点的通信:
- 首先,确保你的Micro-ROS Agent正在正确运行,并且已经正确配置为与你的ROS 2节点通信。从你提供的日志来看,Micro-ROS Agent似乎正在接收和发送数据,这表明它至少在某种程度上是工作的。
- 检查你的Micro-ROS Agent是否运行在正确的网络接口和端口上。在你的命令中,你指定了
udp4 --port 8888,确保你的嵌入式设备也配置为向这个地址和端口发送数据。
-
检查ROS 2节点的配置:
- 确保你的ROS 2节点(运行在嵌入式设备上的Micro-ROS应用)已经正确初始化,并且正在尝试发布或订阅话题,或者提供/使用服务。节点如果没有任何活动(如没有发布或订阅任何话题),
ros2 node list可能不会显示它,因为它在ROS 2网络中实际上没有“活动”。 - 检查嵌入式设备的Micro-ROS代码,确保它正确设置了ROS 2节点名,并且节点名没有与ROS 2系统中的其他节点冲突。
- 确保你的ROS 2节点(运行在嵌入式设备上的Micro-ROS应用)已经正确初始化,并且正在尝试发布或订阅话题,或者提供/使用服务。节点如果没有任何活动(如没有发布或订阅任何话题),
-
检查网络连接:
- 确保你的物理机(运行ROS 2核心)和嵌入式设备(运行Micro-ROS应用)在同一个网络上,或者至少能够相互通信。你可以使用ping命令来测试网络连接。
- 如果使用UDP进行通信,确保没有防火墙规则阻止UDP端口8888的通信。
-
查看ROS 2和Micro-ROS的日志:
- 在你的ROS 2主机上,尝试运行
ros2 topic list和ros2 service list来查看是否有任何话题或服务被发布或提供。 - 在嵌入式设备上,查看Micro-ROS应用的日志输出,看是否有任何错误或警告信息。
- 在你的ROS 2主机上,尝试运行
-
编译和烧写问题:
- 你提到修改了
micro_ros_platformio的git地址后能够正常编译和烧写。确保你使用的代码库是最新的,或者至少是与你的ROS 2版本兼容的。 - 如果使用了特定的分支或标签,请检查这些是否与你的ROS 2环境相匹配。
- 你提到修改了
-
重启和清理:
- 有时候,简单的重启Micro-ROS Agent、ROS 2核心或者嵌入式设备可以解决通信问题。
- 确保在尝试连接之前,ROS 2核心和Micro-ROS Agent都没有残留的进程或资源占用。
通过上述步骤,你应该能够诊断并解决连接问题。如果问题仍然存在,可能需要更深入地检查代码或配置。
以上为生成回答,仅供参考~
-
-
已经搜索了论坛和尝试解决,花费了一天时间暂时没有成功,中间还有的问题:
https://fishros.com/d2lros2/#/humble/chapt14/basic/2.你的第一个MicroROS节点
编译这个demo成功,启动agent后有数据收发和截图一样,但是ros2 node list一样没有信息
ros2 run teleop_twist_keyboard teleop_twist_keyboard 遥控没有反应
第一次启动用手机遥控正常 -
Executing task: platformio run
Processing fishbot_motion_control_humble (platform: espressif32; board: featheresp32; framework: arduino)
Verbose mode can be enabled via
-v, --verboseoption
CONFIGURATION: https://docs.platformio.org/page/boards/espressif32/featheresp32.html
PLATFORM: Espressif 32 (6.3.1) > Adafruit ESP32 Feather
HARDWARE: ESP32 240MHz, 320KB RAM, 4MB Flash
DEBUG: Current (cmsis-dap) External (cmsis-dap, esp-bridge, esp-prog, iot-bus-jtag, jlink, minimodule, olimex-arm-usb-ocd, olimex-arm-usb-ocd-h, olimex-arm-usb-tiny-h, olimex-jtag-tiny, tumpa)
PACKAGES:- framework-arduinoespressif32 @ 3.20009.0 (2.0.9)
- tool-esptoolpy @ 1.40501.0 (4.5.1)
- toolchain-xtensa-esp32 @ 8.4.0+2021r2-patch5
LDF: Library Dependency Finder -> https://bit.ly/configure-pio-ldf
LDF Modes: Finder ~ chain, Compatibility ~ soft
Installing importlib-resources with pip at PlatformIO environment
/home/robot/.platformio/penv/bin/python -m pip install importlib-resources
Requirement already satisfied: importlib-resources in /home/robot/.platformio/penv/lib/python3.10/site-packages (6.5.2)
Installing pyyaml with pip at PlatformIO environment
/home/robot/.platformio/penv/bin/python -m pip install pyyaml
Requirement already satisfied: pyyaml in /home/robot/.platformio/penv/lib/python3.10/site-packages (6.0.2)
Installing markupsafe==2.0.1 with pip at PlatformIO environment
/home/robot/.platformio/penv/bin/python -m pip install markupsafe==2.0.1
Requirement already satisfied: markupsafe==2.0.1 in /home/robot/.platformio/penv/lib/python3.10/site-packages (2.0.1)
Installing empy==3.3.4 with pip at PlatformIO environment
/home/robot/.platformio/penv/bin/python -m pip install empy==3.3.4
Requirement already satisfied: empy==3.3.4 in /home/robot/.platformio/penv/lib/python3.10/site-packages (3.3.4)
Configuring featheresp32 with transport custom
Downloading micro-ROS dev dependencies
- Downloaded ament_cmake
- Downloaded ament_lint
- Downloaded ament_package
- Downloaded googletest
- Downloaded ament_cmake_ros
- Downloaded ament_index
Building micro-ROS dev dependencies
Downloading micro-ROS library
- Downloaded microcdr
- Downloaded microxrcedds_client
- Downloaded rcl
- Downloaded rcl_yaml_param_parser (ignored)
- Downloaded rcl_lifecycle
- Downloaded rcl_action
- Downloaded rclc_lifecycle
- Downloaded rclc_parameter
- Downloaded rclc_examples (ignored)
- Downloaded rclc
- Downloaded micro_ros_utilities
- Downloaded rcutils
- Downloaded micro_ros_msgs
- Downloaded rmw_microxrcedds
- Downloaded rosidl_typesupport_c
- Downloaded rosidl_typesupport_cpp (ignored)
- Downloaded rosidl_typesupport_microxrcedds_cpp (ignored)
- Downloaded rosidl_typesupport_microxrcedds_cpp_tests
- Downloaded rosidl_typesupport_microxrcedds_test_msg
- Downloaded rosidl_typesupport_microxrcedds_c_tests
- Downloaded rosidl_typesupport_microxrcedds_c
- Downloaded rosidl_typesupport_introspection_tests
- Downloaded rosidl_generator_cpp (ignored)
- Downloaded rosidl_typesupport_introspection_cpp (ignored)
- Downloaded rosidl_generator_c
- Downloaded rosidl_typesupport_introspection_c
- Downloaded rosidl_parser
- Downloaded rosidl_adapter
- Downloaded rosidl_typesupport_interface
- Downloaded rosidl_runtime_c
- Downloaded rosidl_cmake
- Downloaded rosidl_runtime_cpp (ignored)
- Downloaded rosidl_cli
- Downloaded rmw
- Downloaded rmw_implementation_cmake
- Downloaded action_msgs
- Downloaded test_msgs
- Downloaded builtin_interfaces
- Downloaded statistics_msgs
- Downloaded rosgraph_msgs
- Downloaded rcl_interfaces
- Downloaded composition_interfaces
- Downloaded lifecycle_msgs
- Downloaded rosidl_default_generators
- Downloaded rosidl_default_runtime
- Downloaded unique_identifier_msgs
- Downloaded sensor_msgs
- Downloaded geometry_msgs
- Downloaded common_interfaces
- Downloaded visualization_msgs
- Downloaded std_msgs
- Downloaded std_srvs
- Downloaded trajectory_msgs
- Downloaded shape_msgs
- Downloaded sensor_msgs_py
- Downloaded actionlib_msgs
- Downloaded diagnostic_msgs
- Downloaded stereo_msgs
- Downloaded nav_msgs
- Downloaded test_interface_files
- Downloaded test_rmw_implementation
- Downloaded rmw_implementation
- Downloaded rcl_logging_noop
- Downloaded rcl_logging_spdlog (ignored)
- Downloaded rcl_logging_interface
- Downloaded tracetools_test
- Downloaded test_tracetools
- Downloaded ros2trace
- Downloaded tracetools_read
- Downloaded tracetools_trace
- Downloaded test_tracetools_launch
- Downloaded tracetools
- Downloaded tracetools_launch
Checking extra packages
- Adding fishbot_interfaces
Building micro-ROS library
Build mcu micro-ROS environment failed:
--- stderr: rosidl_runtime_c
CMake Warning at /home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rcutils/cmake/ament_cmake_export_libraries-extras.cmake:116 (message):
Package 'rcutils' exports library 'dl' which couldn't be found
Call Stack (most recent call first):
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rcutils/cmake/rcutilsConfig.cmake:41 (include)
CMakeLists.txt:15 (find_package)
--- stderr: rcl_logging_interface
CMake Warning at /home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rcutils/cmake/ament_cmake_export_libraries-extras.cmake:116 (message):
Package 'rcutils' exports library 'dl' which couldn't be found
Call Stack (most recent call first):
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rcutils/cmake/rcutilsConfig.cmake:41 (include)
CMakeLists.txt:19 (find_package)
--- stderr: rmw
CMake Warning at /home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rcutils/cmake/ament_cmake_export_libraries-extras.cmake:116 (message):
Package 'rcutils' exports library 'dl' which couldn't be found
Call Stack (most recent call first):
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rcutils/cmake/rcutilsConfig.cmake:41 (include)
CMakeLists.txt:21 (find_package)
--- stderr: rcl_logging_noop
CMake Warning at /home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rcutils/cmake/ament_cmake_export_libraries-extras.cmake:116 (message):
Package 'rcutils' exports library 'dl' which couldn't be found
Call Stack (most recent call first):
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rcutils/cmake/rcutilsConfig.cmake:41 (include)
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rcl_logging_interface/cmake/ament_cmake_export_dependencies-extras.cmake:21 (find_package)
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rcl_logging_interface/cmake/rcl_logging_interfaceConfig.cmake:41 (include)
CMakeLists.txt:15 (find_package)
--- stderr: rosidl_typesupport_microxrcedds_c
CMake Warning at /home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rcutils/cmake/ament_cmake_export_libraries-extras.cmake:116 (message):
Package 'rcutils' exports library 'dl' which couldn't be found
Call Stack (most recent call first):
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rcutils/cmake/rcutilsConfig.cmake:41 (include)
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rosidl_runtime_c/cmake/ament_cmake_export_dependencies-extras.cmake:21 (find_package)
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rosidl_runtime_c/cmake/rosidl_runtime_cConfig.cmake:41 (include)
CMakeLists.txt:22 (find_package)
--- stderr: micro_ros_utilities
CMake Warning at /home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rcutils/cmake/ament_cmake_export_libraries-extras.cmake:116 (message):
Package 'rcutils' exports library 'dl' which couldn't be found
Call Stack (most recent call first):
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rcutils/cmake/rcutilsConfig.cmake:41 (include)
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rosidl_runtime_c/cmake/ament_cmake_export_dependencies-extras.cmake:21 (find_package)
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rosidl_runtime_c/cmake/rosidl_runtime_cConfig.cmake:41 (include)
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rosidl_typesupport_introspection_c/cmake/ament_cmake_export_dependencies-extras.cmake:21 (find_package)
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rosidl_typesupport_introspection_c/cmake/rosidl_typesupport_introspection_cConfig.cmake:41 (include)
CMakeLists.txt:18 (find_package)
--- stderr: rosidl_typesupport_c
CMake Warning at /home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rcutils/cmake/ament_cmake_export_libraries-extras.cmake:116 (message):
Package 'rcutils' exports library 'dl' which couldn't be found
Call Stack (most recent call first):
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rcutils/cmake/rcutilsConfig.cmake:41 (include)
CMakeLists.txt:33 (find_package)
--- stderr: builtin_interfaces
CMake Warning at /home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rcutils/cmake/ament_cmake_export_libraries-extras.cmake:116 (message):
Package 'rcutils' exports library 'dl' which couldn't be found
Call Stack (most recent call first):
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rcutils/cmake/rcutilsConfig.cmake:41 (include)
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rosidl_runtime_c/cmake/ament_cmake_export_dependencies-extras.cmake:21 (find_package)
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rosidl_runtime_c/cmake/rosidl_runtime_cConfig.cmake:41 (include)
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rosidl_typesupport_introspection_c/cmake/ament_cmake_export_dependencies-extras.cmake:21 (find_package)
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rosidl_typesupport_introspection_c/cmake/rosidl_typesupport_introspection_cConfig.cmake:41 (include)
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rosidl_typesupport_c/cmake/rosidl_typesupport_c-extras.cmake:13 (find_package)
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rosidl_typesupport_c/cmake/rosidl_typesupport_cConfig.cmake:41 (include)
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rosidl_default_generators/cmake/rosidl_default_generators-extras.cmake:21 (find_package)
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rosidl_default_generators/cmake/rosidl_default_generatorsConfig.cmake:41 (include)
CMakeLists.txt:14 (find_package)CMake Error at /home/robot/ros2_humble/install/rosidl_typesupport_fastrtps_c/share/rosidl_typesupport_fastrtps_c/cmake/rosidl_typesupport_fastrtps_c-extras.cmake:5 (find_package):
Could not find a configuration file for package "fastcdr" that is
compatible with requested version "".The following configuration files were considered but not accepted:
/home/robot/ros2_humble/install/fastcdr/lib/cmake/fastcdr/fastcdr-config.cmake, version: 1.0.24 (64bit)Call Stack (most recent call first):
/home/robot/ros2_humble/install/rosidl_typesupport_fastrtps_c/share/rosidl_typesupport_fastrtps_c/cmake/rosidl_typesupport_fastrtps_cConfig.cmake:41 (include)
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rosidl_typesupport_c/cmake/rosidl_typesupport_c-extras.cmake:13 (find_package)
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rosidl_typesupport_c/cmake/rosidl_typesupport_cConfig.cmake:41 (include)
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rosidl_default_generators/cmake/rosidl_default_generators-extras.cmake:21 (find_package)
/home/robot/dkk/fishbot/fishbot_motion_control_microros/.pio/libdeps/fishbot_motion_control_humble/micro_ros_platformio/build/mcu/install/share/rosidl_default_generators/cmake/rosidl_default_generatorsConfig.cmake:41 (include)
CMakeLists.txt:14 (find_package)
Failed <<< builtin_interfaces [1.95s, exited with code 1]
====================================================== [FAILED] Took 138.28 seconds ======================================================
- The terminal process "platformio 'run'" terminated with exit code: 1.
- Terminal will be reused by tasks, press any key to close it.
编译报错的日志
-
换了台电脑,连到虚拟机上正常了
但是物理机上的问题还希望可以解决 -
@realez 用我们编译好的固件呢
-
@小鱼 经过重新安装wsl,使用docker版本的micro ros agent依然不行,通过nc -lv -u等可以收到数据,但是docker仍然不行
重新编译micro ros agent,这个是可以的,现在可以控制小车了
然后测试雷达,在wsl和物理机上都没有/scan topic,都是使用的默认固件[INFO] [ydlidar_node-2]: process has finished cleanly [pid 266]
#?- WIFI转串口测试
- 驱动雷达
- 建图测试
- 退出
#? 2
[INFO] [launch]: All log files can be found below /root/.ros/log/2025-03-07-06-46-24-224878-1ec9d1e7afc9-294
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [tcp_server-1]: process started with pid [295]
[tcp_server-1] [INFO] [1741329984.813777499] [tcp_socket_server_node]: TCP端口:8888,已映射到串口设备:/tmp/tty_laser
[tcp_server-1] [INFO] [1741329984.814272171] [tcp_socket_server_node]: 等待接受连接..
[tcp_server-1] [INFO] [1741329984.819953389] [tcp_socket_server_node]: 来自('172.17.0.1', 52504)的连接已建立
[INFO] [ydlidar_node-2]: process started with pid [318]
[ydlidar_node-2] [INFO] [1741329988.189255796] [ydlidar_node]: [YDLIDAR INFO] Current ROS Driver Version: 1.0.1
[ydlidar_node-2]
[ydlidar_node-2] [2025-03-07 06:46:28][info] SDK initializing
[ydlidar_node-2] [2025-03-07 06:46:28][info] SDK has been initialized
[ydlidar_node-2] [2025-03-07 06:46:28][info] SDK Version: 1.2.9
[ydlidar_node-2] [2025-03-07 06:46:28][info] Connect elapsed time 0 ms
[ydlidar_node-2] [2025-03-07 06:46:28][info] Lidar successfully connected [/tmp/tty_laser:115200]
[ydlidar_node-2] [2025-03-07 06:46:28][info] Lidar running correctly! The health status good
[ydlidar_node-2] [2025-03-07 06:46:28][info] Current Lidar Model Code 12
[ydlidar_node-2] [2025-03-07 06:46:28][info] Check status, Elapsed time 0 ms
[ydlidar_node-2] [2025-03-07 06:46:28][info] Lidar init success, Elapsed time [0]ms
[ydlidar_node-2] [2025-03-07 06:46:28][info] Start to getting intensity flag
[ydlidar_node-2] [2025-03-07 06:46:29][info] Auto set intensity 0
[ydlidar_node-2] [2025-03-07 06:46:29][info] [YDLIDAR] End to getting intensity flag
[ydlidar_node-2] [2025-03-07 06:46:29][info] [YDLIDAR] Create thread 0xD6F8F640
[ydlidar_node-2] [2025-03-07 06:46:29][info] Successed to start scan mode, Elapsed time 1748 ms
[ydlidar_node-2] [2025-03-07 06:46:29][info] Scan Frequency: 5.00Hz
[ydlidar_node-2] [2025-03-07 06:46:29][info] Fixed Size: 720
[ydlidar_node-2] [2025-03-07 06:46:29][info] Sample Rate: 3.00K
[ydlidar_node-2] [2025-03-07 06:46:30][info] Scan Frequency: 5.00Hz
[ydlidar_node-2] [2025-03-07 06:46:30][info] Fixed Size: 720
[ydlidar_node-2] [2025-03-07 06:46:30][info] Sample Rate: 3.00K
[ydlidar_node-2] [2025-03-07 06:46:30][info] Scan Frequency: 5.00Hz
[ydlidar_node-2] [2025-03-07 06:46:30][info] Fixed Size: 720
[ydlidar_node-2] [2025-03-07 06:46:30][info] Sample Rate: 3.00K
[ydlidar_node-2] [2025-03-07 06:46:30][info] Scan Frequency: 5.00Hz
[ydlidar_node-2] [2025-03-07 06:46:30][info] Fixed Size: 720
[ydlidar_node-2] [2025-03-07 06:46:30][info] Sample Rate: 3.00K
[ydlidar_node-2] [2025-03-07 06:46:30][info] Scan Frequency: 5.00Hz
[ydlidar_node-2] [2025-03-07 06:46:30][info] Fixed Size: 720
[ydlidar_node-2] [2025-03-07 06:46:30][info] Sample Rate: 3.00K
[ydlidar_node-2] [2025-03-07 06:46:30][info] Single Fixed Size: 440
[ydlidar_node-2] [2025-03-07 06:46:30][info] Sample Rate: 3.00K
[ydlidar_node-2] [2025-03-07 06:46:30][info] Successed to check the lidar, Elapsed time 541 ms
[ydlidar_node-2] [2025-03-07 06:46:30][info] Now lidar is scanning...
[ydlidar_node-2] [2025-03-07 06:46:48][error] Check Sum 0x6AEB != 0x7A6F
[ydlidar_node-2] [2025-03-07 06:46:58][error] Check Sum 0x6E44 != 0x6E98
[ydlidar_node-2] [2025-03-07 06:47:27][error] Check Sum 0x6C3F != 0x7CE0
[ydlidar_node-2] [2025-03-07 06:47:33][error] Check Sum 0xD455 != 0xC98D
[ydlidar_node-2] [2025-03-07 06:47:55][error] Check Sum 0x143C != 0x0B93
[ydlidar_node-2] [2025-03-07 06:48:43][error] Check Sum 0x6A2D != 0x6D12
[ydlidar_node-2] [YDLIDAR ERROR]: -1 No error
[ydlidar_node-2] [ERROR] [1741330125.710855634] [ydlidar_node]: Failed to get scan
[ydlidar_node-2] [2025-03-07 06:48:45][error] Timeout count: 1
[ydlidar_node-2] [2025-03-07 06:48:54][error] Check Sum 0x66F2 != 0x6021
[ydlidar_node-2] [2025-03-07 06:49:38][error] Check Sum 0x522B != 0x2A94
[ydlidar_node-2] [2025-03-07 06:50:20][error] Check Sum 0x6BE9 != 0x35
-
补充之前遇到的问题和处理方式
第一个wsl,ros2 node list无输出,未解决,放弃
安装第二个wsl,完全使用firshros安装,出现过ros2 node list卡住,重启daemon解决
物理机ros2 node list无输出,topic无输出,但是micro ros agent可以连接,可以控制小车 -
@realez 雷达的测试程序,有没有可执行程序而不是docker
-
在之前virtualbox的ubuntu虚拟机中,测试雷达可以,但是这个虚拟机很卡,做了很多调整还是不行
建图质量不好,数据丢的很多 -
@realez 雷达的测试程序,有没有可执行程序而不是docker 这个看视频教程或者数据9.5有介绍方法
wsl估计是网络穿透问题,我之前没有测试通过过
-
@realez 您好,想请教一下,我在用wsl的时候也出现了类似的问题,通过docker启动micro ros agent可以收到小车消息,终端也一直在打印,但是ros2 node list看不到小车节点,请问您知道解决方法吗?感谢!
-
@484232542 系统信息,用户信息 报一下
-
@小鱼 wsl2+ubuntu22.04,ros2 humble,电脑和小车接同一个路由器,2.4G频段。电脑ip192.168.31.128(防火墙已关,用同一个局域网的其他电脑可以ping通我的电脑),小车ip 192.168.31.145。电脑可以ping通小车,在docker中也收到了小车消息并在终端打印,但小车显示屏上显示wifi: ping timeout。
-
@484232542 我在ubuntu22.04里写了个发udp消息的python脚本,并在同一个局域网的另一台电脑上监听对应端口,也是可以正常收到我电脑的消息的。
-
@484232542 我一般重启ros dameon就好了
pkill -f "ros2 _daemon"
ros2 daemon start
ros2 daemon status
ros2 node list --no-daemon #如果这条能打印node,应该就是daemon导致的服务发现问题 -
@realez 您好,非常感谢您的回复!我的操作过程是这样的:
- ros2 daemon stop
The daemon has been stopped - ros2 daemon status
The daemon is not running - ros2 daemon start
The daemon has been started - ros2 daemon status
The daemon is running - ros2 node list --no-daemon
仍然没有显示任何的node,可能不是这个类型的问题。
- ros2 daemon stop
-
@484232542 另外,还发现了一个问题,docker容器启动后,终端打印的日志debug信息只有UDPv4AgentLinux.cpp | recv_message和UDPv4AgentLinux.cpp | send_message

但根据视频教程“9.0.3. 主控板固件烧录与配置”,应该会要有下图红框所示的其他日志消息


-
@484232542 感觉是 wsl2 问题,建议用虚拟机或者实体机试试
-
你好,我也是node list没有输出