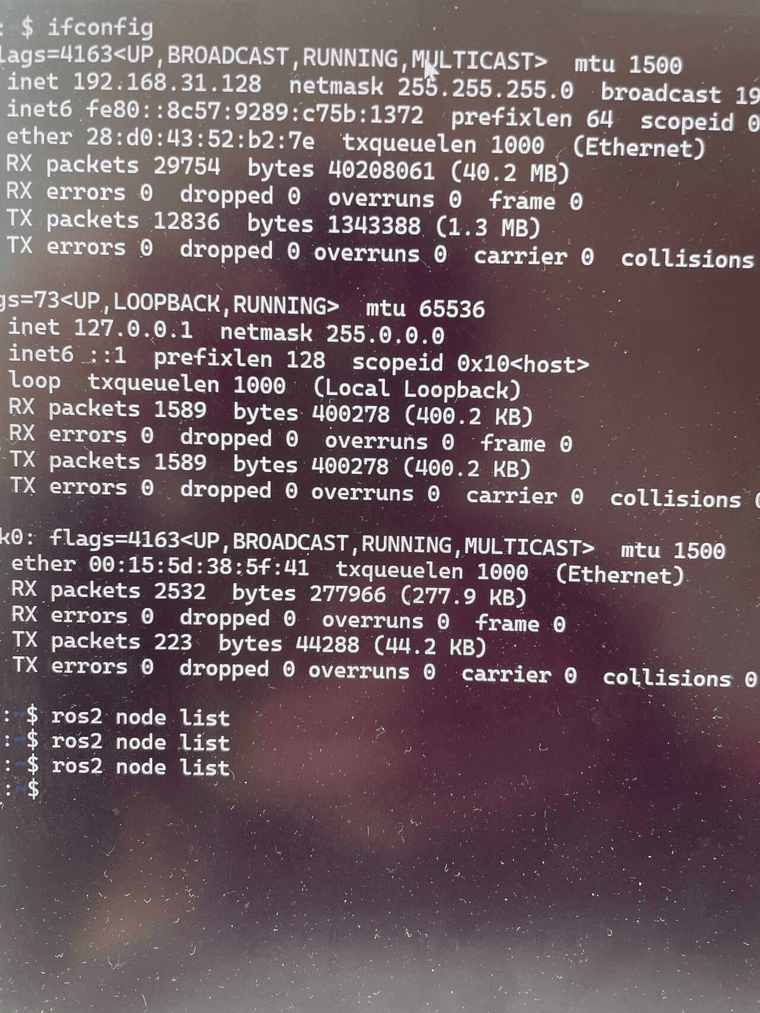
新买的二驱小车, 通过micro ros agent连接电脑后,ros2 node list没有对于node
-
在之前virtualbox的ubuntu虚拟机中,测试雷达可以,但是这个虚拟机很卡,做了很多调整还是不行
建图质量不好,数据丢的很多 -
@realez 雷达的测试程序,有没有可执行程序而不是docker 这个看视频教程或者数据9.5有介绍方法
wsl估计是网络穿透问题,我之前没有测试通过过
-
@realez 您好,想请教一下,我在用wsl的时候也出现了类似的问题,通过docker启动micro ros agent可以收到小车消息,终端也一直在打印,但是ros2 node list看不到小车节点,请问您知道解决方法吗?感谢!
-
@484232542 系统信息,用户信息 报一下
-
@小鱼 wsl2+ubuntu22.04,ros2 humble,电脑和小车接同一个路由器,2.4G频段。电脑ip192.168.31.128(防火墙已关,用同一个局域网的其他电脑可以ping通我的电脑),小车ip 192.168.31.145。电脑可以ping通小车,在docker中也收到了小车消息并在终端打印,但小车显示屏上显示wifi: ping timeout。
-
@484232542 我在ubuntu22.04里写了个发udp消息的python脚本,并在同一个局域网的另一台电脑上监听对应端口,也是可以正常收到我电脑的消息的。
-
@484232542 我一般重启ros dameon就好了
pkill -f "ros2 _daemon"
ros2 daemon start
ros2 daemon status
ros2 node list --no-daemon #如果这条能打印node,应该就是daemon导致的服务发现问题 -
@realez 您好,非常感谢您的回复!我的操作过程是这样的:
- ros2 daemon stop
The daemon has been stopped - ros2 daemon status
The daemon is not running - ros2 daemon start
The daemon has been started - ros2 daemon status
The daemon is running - ros2 node list --no-daemon
仍然没有显示任何的node,可能不是这个类型的问题。
- ros2 daemon stop
-
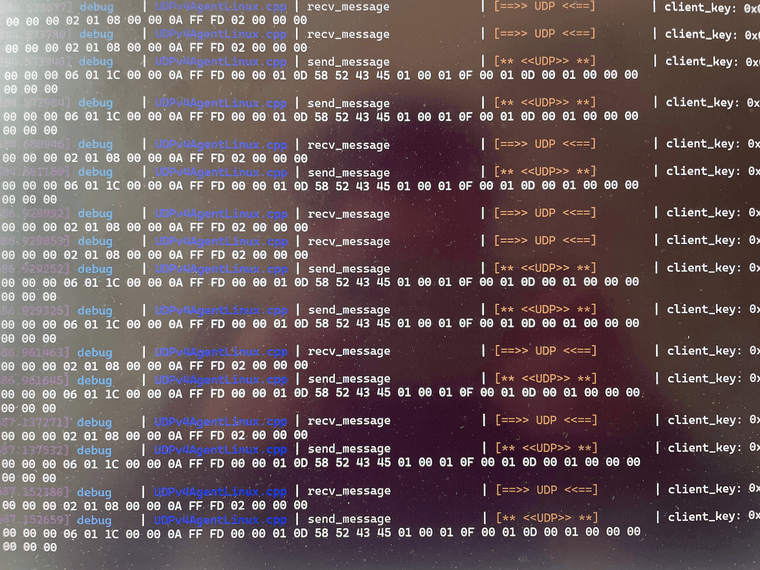
@484232542 另外,还发现了一个问题,docker容器启动后,终端打印的日志debug信息只有UDPv4AgentLinux.cpp | recv_message和UDPv4AgentLinux.cpp | send_message

但根据视频教程“9.0.3. 主控板固件烧录与配置”,应该会要有下图红框所示的其他日志消息


-
@484232542 感觉是 wsl2 问题,建议用虚拟机或者实体机试试