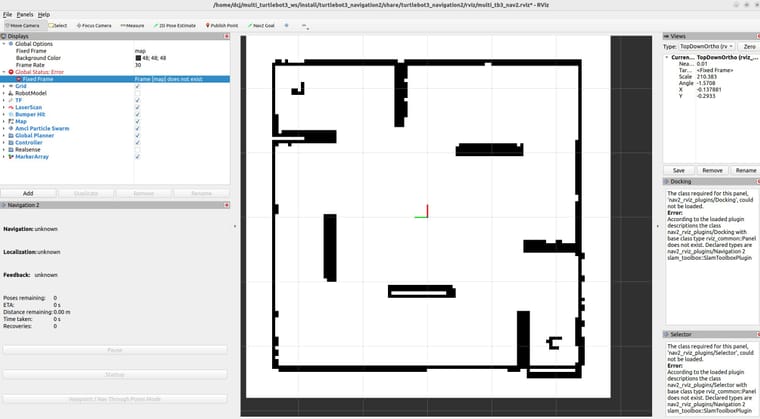
添加了命名空间启动小车和导航后,tf树里没有map到TB3_1/odom的关系,rviz里显示map坐标系不存在。
-
我启动官方的turtlebot3_simulations/turtlebot3_gazebo/launch/multi_robot.launch.py,官方的为3个turtlebot3同时启动,因为需要完成多机器人导航,我为了先测试修改为启动1个小车,这个小车都添加了命名空间TB3_1。
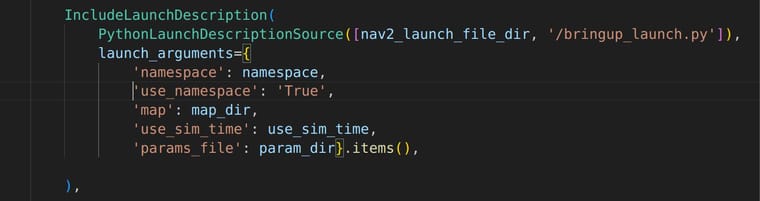
然后我将官方的turtlebot3_navigation2/launch/navigation2.launch.py中的这一部分也添加了命名空间

最后我启动,但是rviz里面显示找不到map坐标系,点击2d pose estimate也无法设置初始位姿
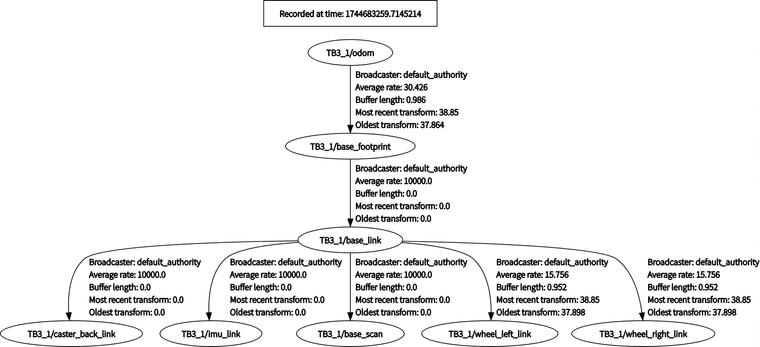
tf树里也没有map
我想问问是不是我这样的修改想法太简单了,已经困扰了我好多天了,我也试过修改burger.yaml里面的参数文件,同样也是没有效果,所以来求助各位!