gazebo和rviz联合仿真时模型位置不对
-
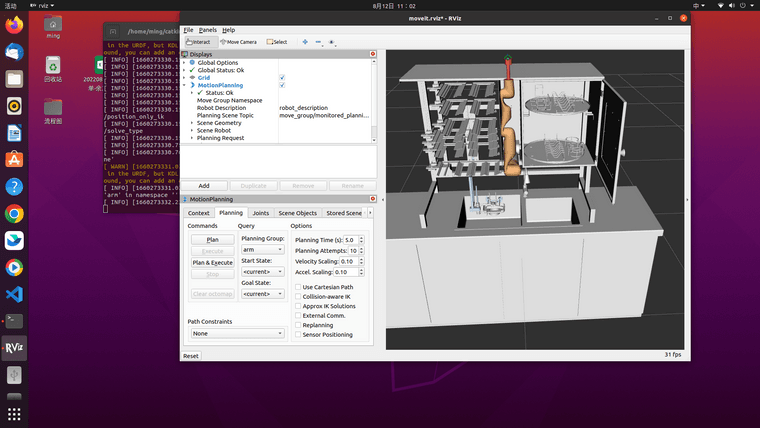
一开始rviz看到的 是这样的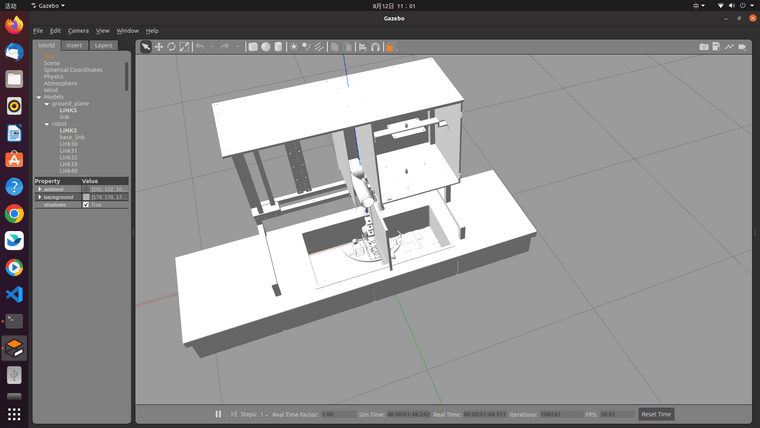
运行demo_gazebo.launch就变成这样了,好像全部都往中间去了
-
L LittleMING 将这个主题转为问答主题,在
-
@LittleMING 瞅了老半天,如果整个是一个URDF模型,该调整的关节都给搞成fixed,防止仿真是因为物理属性发生变化,导致模型位置变化.
-
@小鱼 主要是这几个零件我想让他能被机械臂移动,做到实时仿真
-
@LittleMING gazebo是物理仿真,没有任何支撑的零件会因为重力掉落
-
@小鱼 这个不是因为重力掉落,我是把父辈都连接到base_link上了,所有零件都渠道坐标原点了,我希望机械臂能拖动一个能滑动的关节,那个零件我就设置成prismatic,自然就不能设置成fix了
-
@LittleMING 如果是prismatic你可以试试增加摩擦力之类的,模仿物理世界,如果物品可以在物理世界组装起来,仿真参数一致情况下,也应该可以被仿真出来.
-
Y young 将这个主题转为普通主题,在