重要提示
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
gazebo 利用rqt导入urdf模型报错
-
按照《动手学ros》机器人仿真章节(第九章 第三节)中,利用rqt服务向gazebo中导入urdf模型,结果出现如下报错,gazebo中也无没有反应。
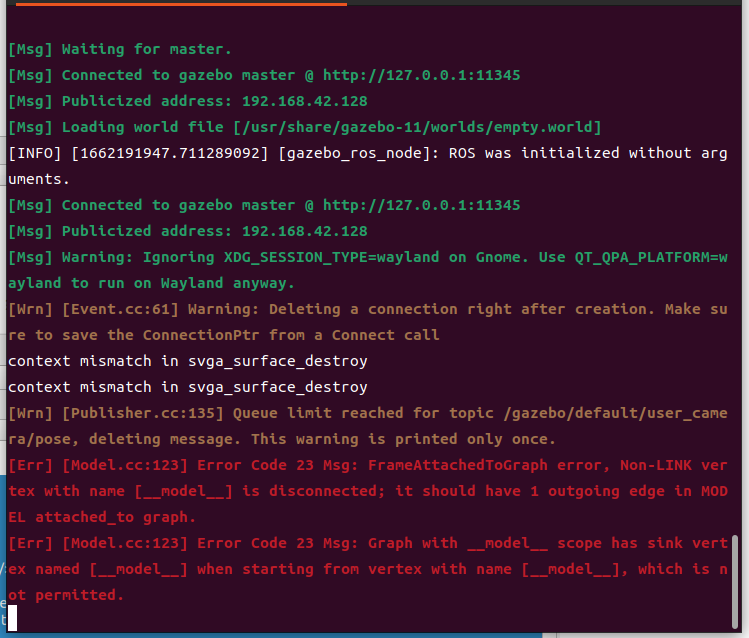
求解答!!! -
补充:
这是我的rqt界面
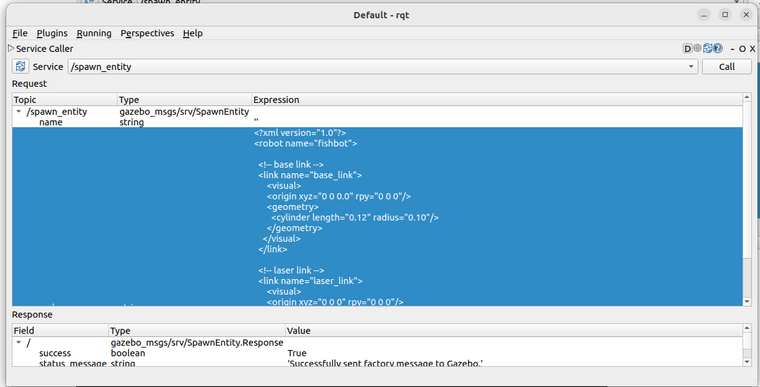
-
再补充。。。。。
还是按照动手学ros同一章节继续操作——将启动gazebo和生产fishbot写成launch文件,然后运行还是报错。

不知道和上面是不是同一个问题,希望能一起解决。 -
@世人 gazebo没有彻底杀死的原因,调用指令
killall gzserver
killall gzclient@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
不要截图,要复制粘贴,一定要代码块包裹
-
@小鱼
试过了killall gzserver
killall gzclient 问题也没有得到解决。用rqt 把urdf模型导入的时候报错信息如下:
[Err] [Model.cc:123] Error Code 23 Msg: FrameAttachedToGraph error, Non-LINK vertex with name [model] is disconnected; it should have 1 outgoing edge in MODEL attached_to graph.
[Err] [Model.cc:123] Error Code 23 Msg: Graph with model scope has sink vertex named [model] when starting from vertex with name [model], which is not permitted.看内容好像是模型 问题,但是我用《动手学ROS2》里面的urdf也不行。
打开gazebo就有警告,但是看网上说这个警告内容无伤大雅
Warning: Deleting a connection right after creation. Make sure to save the ConnectionPtr from a Connect call(这个问题百度了好多天也没解决,本来打算跳过仿真直接学下面的了,,感觉跳不过去)
真的挺苦恼的,希望可以得到指教 -
@世人 兄弟你解决了吗,我机械臂模型打不开,gazebo界面一直卡死,然后就自己退了
-
好像是没有加物理和惯量的那些参数,加上后就导入成功了,可以参考https://github.com/gazebosim/sdformat/issues/199
-
兄弟你这个问题解决了么,我也卡在这里了