ros2 foxy moveit2,在rviz中加载模型变黑,gazebo显示正常,且能正常使用
-
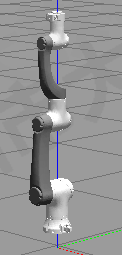
rviz

gazebo
-
@小鱼 确实是颜色标签的问题。。。我在移植的时候忘记把描述颜色的xacro文件移植过来了。。感谢
-
@mu 贴一下urdf,估计是urdf中颜色配置问题
-
@小鱼 应该不是urdf的问题,gazebo和rviz中加载的robot_description用的都是同一个urdf
-
@mu 如果我没记错,gazebo和rviz用的颜色描述是不同标签。
-
@小鱼 这是关节一的urdf
<link name="elfin_link1"> <inertial> <origin xyz="-0.021815 -1.1609E-05 0.095394" rpy="0 0 0" /> <mass value="${2.576772*density}"/> <inertia ixx="${0.01298966*density}" ixy="${0.00287966*density}" ixz="${-0.000001*density}" iyy="${0.00721115*density}" iyz="${-0.00000052*density}" izz="${0.01532713*density}"/> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="file://$(find elfin_description)/meshes/elfin5/elfin_link1.STL" /> </geometry> <material name="metal"/> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="file://$(find elfin_description)/meshes/elfin5/elfin_link1.STL" /> </geometry> </collision> </link> <joint name="elfin_joint1" type="revolute"> <origin xyz="0 0 0.0735" rpy="0 0 0" /> <parent link="elfin_base" /> <child link="elfin_link1" /> <axis xyz="0 0 1" /> <limit lower="-3.14" upper="3.14" effort="200" velocity="1.57" /> </joint> -
-
@小鱼 确实是颜色标签的问题。。。我在移植的时候忘记把描述颜色的xacro文件移植过来了。。感谢
-
 小 小鱼 将这个主题标记为已解决,在
小 小鱼 将这个主题标记为已解决,在