机械臂moveit+gazebo 联合仿真报错
-
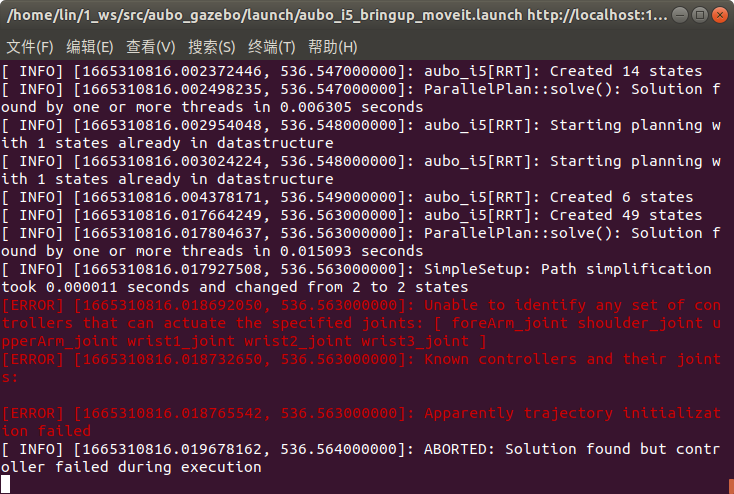
我按照古月居moveit视频里的操作进行配置,只是机器人描述文件换成了aubo_i5的,在运行时报如下错误:
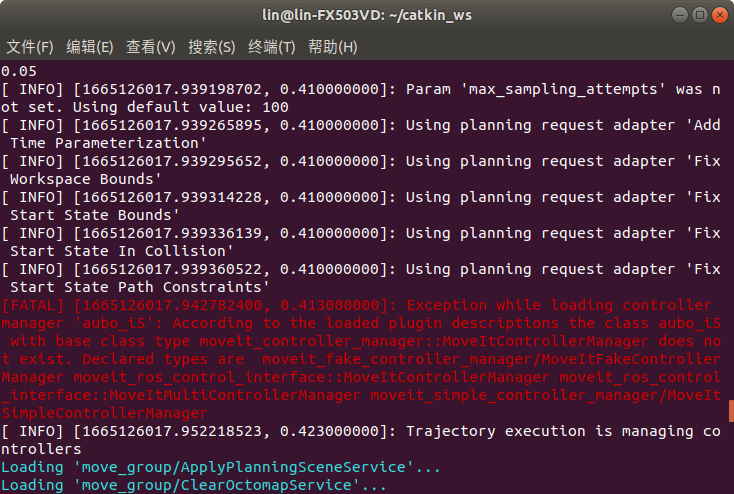
目前能在gazebo和rviz中显示模型,但是点击execution,gazebo不会跟着运动。
由moveit配置助手生成的文件基本没有改动,只有改动了moveit_rviz.launch(也是因为一个报错,在网上找的解决办法),还有就是aubo_i5_moveit_controller_manager.launch.xml文件,如下:<launch> <!-- Set the param that trajectory_execution_manager needs to find the controller plugin --> <arg name="moveit_controller_manager" default="moveit_simple_controller_manager/MoveItSimpleControllerManager" /> <param name="moveit_controller_manager" value="$(arg moveit_controller_manager)"/> <!-- load controller_list --> <rosparam file="$(find aubo_i5_moveit_config)/config/controllers_gazebo.yaml"/> </launch>controllers_gazebo.yaml文件如下:
controller_manager_ns: controller_manager controller_list: - name: aubo_i5_controller action_ns: follow_joint_trajectory default: True type: FollowJointTrajectory joints: - shoulder_joint - upperArm_joint - foreArm_joint - wrist1_joint - wrist2_joint - wrist3_joint如下是moveit功能包李集成launch文件,moveit_planning_execution.launch
<launch> # The planning and execution components of MoveIt! configured to # publish the current configuration of the robot (simulated or real) # and the current state of the world as seen by the planner <include file="$(find aubo_i5_moveit_config)/launch/move_group.launch"> <arg name="publish_monitored_planning_scene" value="true" /> </include> # The visualization component of MoveIt! <include file="$(find aubo_i5_moveit_config)/launch/moveit_rviz.launch"> <arg name="config" value="true" /> </include> <!-- We do not have a robot connected, so publish fake joint states --> <node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher"> <param name="/use_gui" value="false"/> <rosparam param="/source_list">[/aubo_i5/joint_states]</rosparam> </node> </launch>move_group.launch文件如下
<launch> <!-- GDB Debug Option --> <arg name="debug" default="false" /> <arg unless="$(arg debug)" name="launch_prefix" value="" /> <arg if="$(arg debug)" name="launch_prefix" value="gdb -x $(find aubo_i5_moveit_config)/launch/gdb_settings.gdb --ex run --args" /> <!-- Verbose Mode Option --> <arg name="info" default="$(arg debug)" /> <arg unless="$(arg info)" name="command_args" value="" /> <arg if="$(arg info)" name="command_args" value="--debug" /> <!-- move_group settings --> <arg name="pipeline" default="ompl" /> <arg name="allow_trajectory_execution" default="true"/> <arg name="fake_execution" default="false"/> <arg name="fake_execution_type" default="interpolate" /> <arg name="max_safe_path_cost" default="1"/> <arg name="jiggle_fraction" default="0.05" /> <arg name="publish_monitored_planning_scene" default="true"/> <arg name="capabilities" default=""/> <arg name="disable_capabilities" default=""/> <!-- load these non-default MoveGroup capabilities (space seperated) --> <!-- <arg name="capabilities" value=" a_package/AwsomeMotionPlanningCapability another_package/GraspPlanningPipeline " /> --> <!-- inhibit these default MoveGroup capabilities (space seperated) --> <!-- <arg name="disable_capabilities" value=" move_group/MoveGroupKinematicsService move_group/ClearOctomapService " /> --> <arg name="load_robot_description" default="true" /> <!-- load URDF, SRDF and joint_limits configuration --> <include file="$(find aubo_i5_moveit_config)/launch/planning_context.launch"> <arg name="load_robot_description" value="$(arg load_robot_description)" /> </include> <!-- Planning Functionality --> <include ns="move_group" file="$(find aubo_i5_moveit_config)/launch/planning_pipeline.launch.xml"> <arg name="pipeline" value="$(arg pipeline)" /> <arg name="capabilities" value="$(arg capabilities)"/> <arg name="disable_capabilities" value="$(arg disable_capabilities)"/> </include> <!-- Trajectory Execution Functionality --> <include ns="move_group" file="$(find aubo_i5_moveit_config)/launch/trajectory_execution.launch.xml" if="$(arg allow_trajectory_execution)"> <arg name="moveit_manage_controllers" value="true" /> <arg name="moveit_controller_manager" value="aubo_i5" unless="$(arg fake_execution)"/> <arg name="moveit_controller_manager" value="fake" if="$(arg fake_execution)"/> <arg name="fake_execution_type" value="$(arg fake_execution_type)" /> </include> <!-- Sensors Functionality --> <include ns="move_group" file="$(find aubo_i5_moveit_config)/launch/sensor_manager.launch.xml" if="$(arg allow_trajectory_execution)"> <arg name="moveit_sensor_manager" value="aubo_i5" /> </include> <!-- Start the actual move_group node/action server --> <node name="move_group" launch-prefix="$(arg launch_prefix)" pkg="moveit_ros_move_group" type="move_group" respawn="false" output="screen" args="$(arg command_args)"> <!-- Set the display variable, in case OpenGL code is used internally --> <env name="DISPLAY" value="$(optenv DISPLAY :0)" /> <param name="allow_trajectory_execution" value="$(arg allow_trajectory_execution)"/> <param name="max_safe_path_cost" value="$(arg max_safe_path_cost)"/> <param name="jiggle_fraction" value="$(arg jiggle_fraction)" /> <!-- Publish the planning scene of the physical robot so that rviz plugin can know actual robot --> <param name="planning_scene_monitor/publish_planning_scene" value="$(arg publish_monitored_planning_scene)" /> <param name="planning_scene_monitor/publish_geometry_updates" value="$(arg publish_monitored_planning_scene)" /> <param name="planning_scene_monitor/publish_state_updates" value="$(arg publish_monitored_planning_scene)" /> <param name="planning_scene_monitor/publish_transforms_updates" value="$(arg publish_monitored_planning_scene)" /> </node> </launch> -
@Aquiver 看起来是执行器的原因,可以检查一下action相关的服务是否存在,以及名称。
-
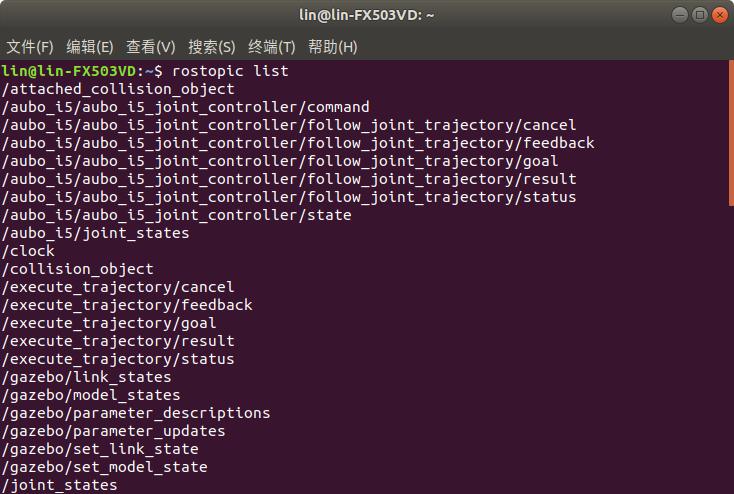
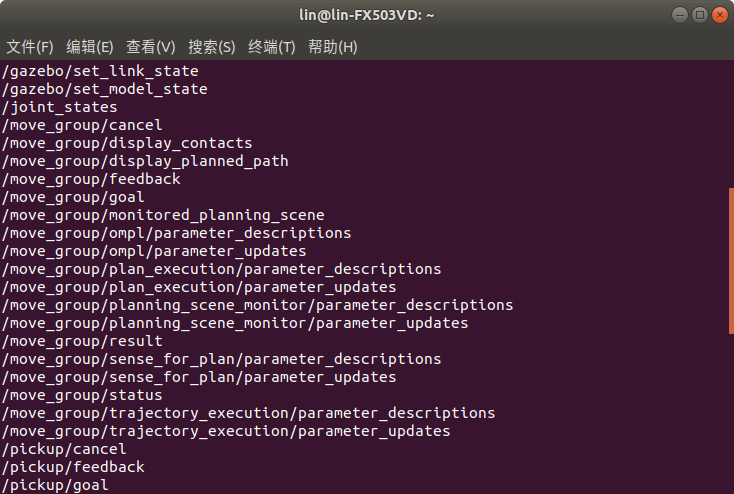
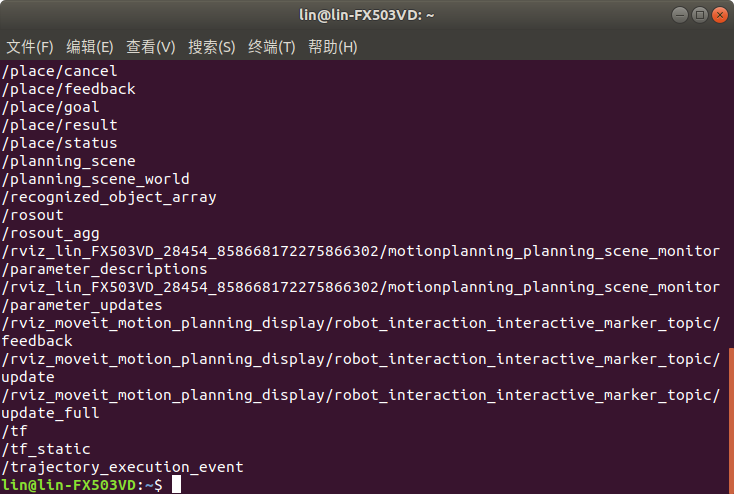
@小鱼 我刚接触到这 命令是像查话题列表那样吗
这里是话题列表
我试着在rviz中拖动执行,终端会报这个错
-
@小鱼 解决了 谢谢小鱼
-
@Aquiver 咋解决的,好奇
-
@小鱼 是我的controllers_gazebo.yaml文件里面name那一行不对

-
@Aquiver 大哥,我也是首先用古月居的anno跑了一遍,能在gazebo里面动起来。现在换成自己DIY的机械臂就报错了。
报错内容:[ERROR] [1669167751.277877941, 37.752000000]: Unable to identify any set of controllers that can actuate the specified joints: [ joint_1 joint_2 joint_3 joint_4 ] [ERROR] [1669167751.277897873, 37.752000000]: Known controllers and their joints: [ERROR] [1669167751.277925647, 37.752000000]: Apparently trajectory initialization failed大哥知道怎么解决么,我名字都对上了。具体的我在社区提问了,大哥,帮忙看看怎么回事嘛,感激不尽。
-
@Aquiver 请问name那一行正确的应该是什么
-
@1769564038 哥们这个问题解决了吗 我用自己机械臂配置rivz和gazebo联动 报错