轮毂电机机器人底盘foxy版代码跑通,把在foxy踩过的坑和经验分享
-
硬件配置:联想x230笔记本作主控,普通平衡车轮毂电机,轮毂电机控制板,雷神M10激光雷达,另一台联想t470笔记本做远程控制。

为了远程控制机器人,刚刚入手的一台联想t470,两千多一点,16g内存 i5处理器 500固态硬盘,win10系统,为了测试一下虚拟机性能,这台笔记本按鱼总的课程安装的ubuntu 20.4虚拟机,当时计划如果太卡就在安装双系统,经测试,虚拟机运行非常稳定,和真正的ubuntu机子区别不大。
不得不说,鱼总的一键装机真的是太牛了,没有刷到鱼总前我第一次装ros装了半个多月,当时差点就放弃了,现在装ros几分钟搞定。感谢鱼总!!!!!!!!
人家说熟练装机需要50遍,我没有具体算过,不过我觉得2-30十次是有了,说这些只是为一些初学者打打气。
对于ros经常出现的莫名其妙的问题,我想做过的肯定身有体会,我觉得和自动安装依赖的这2个命令有关系。rosdepc install -r --from-paths src --ignore-src --rosdistro $ROS_DISTRO -ycolcon build --packages-up-to cartographer_ros因为我们是在学习,肯定会下载很多人的代码,好多代码里面有重复的包,经过自动安装依赖把有用的东西多次覆盖了,导致系统故障,到最后只能重装系统。

雷达超出了车体,容易撞坏了,向里面移了一点

笔记本做主控有一个好处就是配置比树梅派高,实验完了还能利用,但是需要单独充电,不是太方便。

我从今年六月份就买了轮毂电机和轮毂电机控制板,为什么用了这么久才跑通代码呢,我的轮毂电机控制板没有odom话题,卖家给我提供的代码不是foxy版的,c++我又看不懂,为了看懂c++的代码我又学了2个多月c++,才把odom话题拼凑出来,感谢你碰到的每一个错误吧,因为这些错误会让你学会很多东西,如果你只是买一套现成的配件大概不超过一个星期就能跑通,但所基本上什么也学不会。代码一定要自己抄 ,只是看永远学不会,鱼总的代码有的我抄了好几遍才能看懂。
轮毂电机是大功率底盘最经济的选择,里面自带计数,节省很多成本,非常皮实,我用的这个控制板不知道是虚接还是程序有bug,在外面砖铺的颠簸路面有时会轮子不受控制,在平整的室内用的还是挺好用的,下一步要研究一行stm32,弄块皮实的控制板。
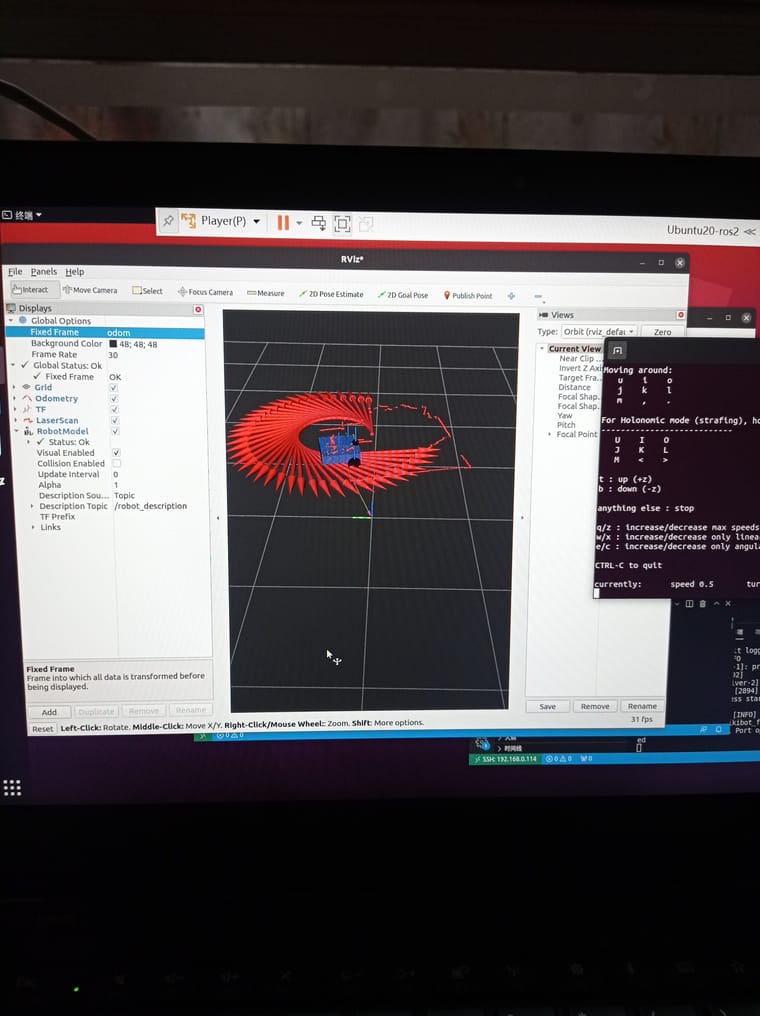
urdf模型 建图 导航用的鱼总讲课的代码,代码跑通了,但是还很不稳定,下一步升级ros2 用humble在弄细节 -
@毛哥成山轮胎机油保养 远程登陆主机,修改代码,用vscode 安装ssh插件,远程连接好后就和操作本地的电脑一样,太好用了
-
@毛哥成山轮胎机油保养 强,一步步的做出来了