Cartographer 我也试一把只用雷达建图
-
Cartographer手持雷达SLAM建图
模仿鱼总的手持雷达建图,我的雷达在车上装着呢,不开模型,不开运动控制板,只开工控机和雷达,只运行雷达的驱动包,和建图程序。雷达框架base_laser,话题 /scan。代码参考网页
代码地址
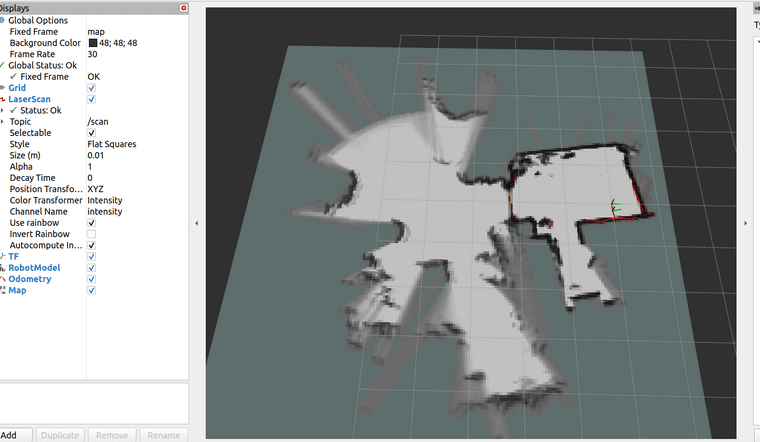
其实运行不成功90%的原因是名字不一样造成的,比如雷达 有的是laser_link base_laser laser 文件的地址和名字,哪一个错了都是不行的,运行不动就仔细比对看看哪个名字不一样。体会:手持雷达建图,只开启雷达,其他如车轮编码器 odom一类的东西都不开启 ,建图精度比开启机器人精度要高,地图漂移的不那么利害,难道车轮编码器发布的odom是起得负作用吗?是不是可以省掉车轮编码器呢?
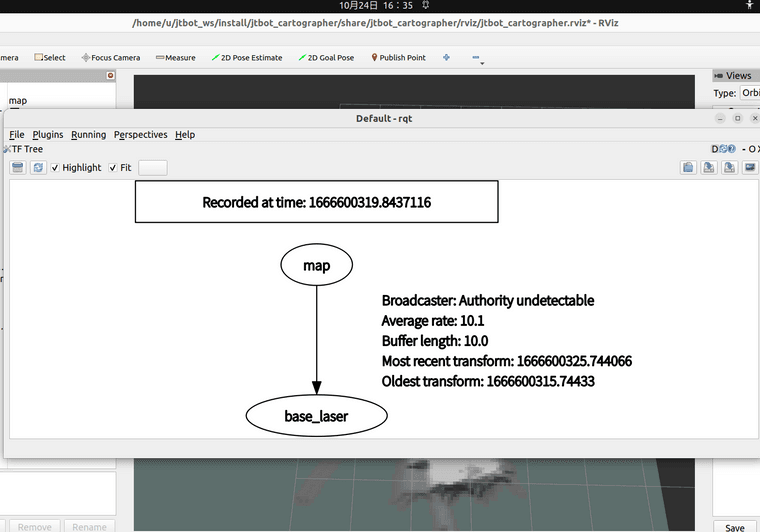
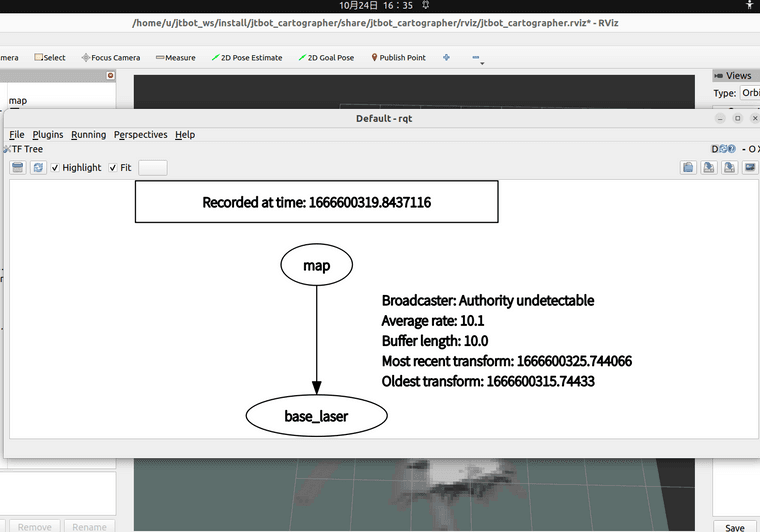
rqt tf tree
-
@毛哥成山轮胎机油保养 虽然纯雷达有可能会精度更高,但对快速旋转,长走廊等场景容易出现问题,最好是融合imu和里程计信息,后面我会更新这块的调优内容
-
@小鱼 带里程计地图漂移太利害,转几圈地图就不能用了
-
@毛哥成山轮胎机油保养 雷达和base_link直接的外参设置的对不对,这个也会有很大的影响
-
@毛哥成山轮胎机油保养 我拿小鱼的方法测试了只用雷达建图,运行后找不到
cartographer_occupancy_grid_node = Node( package='cartographer_ros', executable='cartographer_occupancy_grid_node', name='cartographer_occupancy_grid_node', output='screen', parameters=[{'use_sim_time': use_sim_time}], arguments=['-resolution', resolution, '-publish_period_sec', publish_period_sec])这个节点。我用的ros版本是foxy,但是我看了git上
cartographer_ros仓库,确实没有找到cartographer_occupancy_grid_node这个节点。老哥是怎么运行的? -
-
@毛哥成山轮胎机油保养 我找到问题了。ros2下的cartographer_ros包的ros2分支有这个包,我编译的是dashing版本。
-
@毛哥成山轮胎机油保养 想直接拿小鱼的包直接跑建图,看来有点问题
-
@Lorry 他用的humble版本 我也是在humble测试的 ,不过手持雷达建图只是把机器人模型停掉,别的没有变化,和版本关系应该不大 ,导航的代码我是用atp安装的

用源码安装我觉得对初学者不友好,如果apt安装你找的那个包就在系统里面。 -
@毛哥成山轮胎机油保养 这个包确实在foxy没有。我也是刚接触激光建图,想先跑跑案例,看来还要再找找
-
L Lorry 在 中 引用了 这个主题