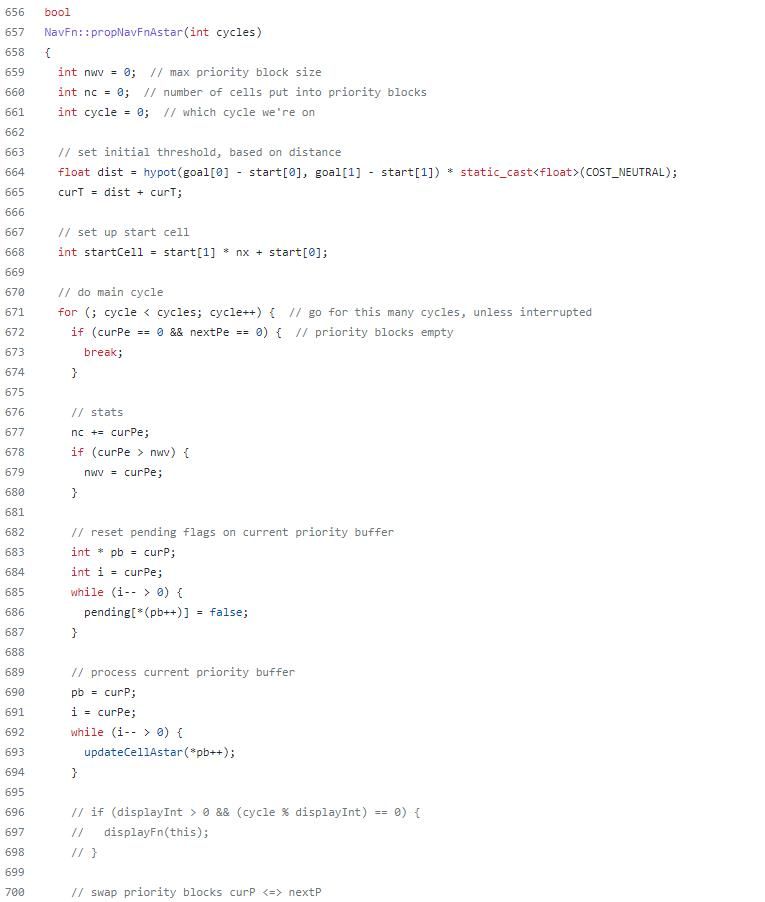
navigation2中的A*算法是在nav2_navfn_planner规划器中的propNavFnAstar函数中实现的吗 navigation1中A*算法在global _planner规划器中实现,而navigation2中却没有这个插件呢
-
-
首次提问请注意,比如你所看的nav2源码版本,ros2具体的版本信息等,代码的github源码地址
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
一个好的提问不仅能够帮助自己理清楚问题,还有助于别人快速帮助到你。——提问的智慧
问题一定要描述清楚,终端打印一定复制粘贴(你可以在linux系统上打开浏览器进社区)
基本的Markdown语法一定要学习下,有的小伙伴图片代码一团糟
提问时一定要提供尽可能多的信息(系统版本,ROS版本,前后操作,终端日志),包括你的目的,比如你其实想装装某个库遇到问题,不要只说这个问题,因为可能有更好的替代方案
先搜索再提问,很多问题其实都有解决方案,确保你自己对自己的问题有一定了解再提问
尽量一句话说完,不要把社区当微信聊天一样用,每一个回复都尽量提供更多的的信息。 -
@小鱼 好的好的
-
@小鱼 鱼总,我想问您一下,nav2包中自带的A算法是双向搜索的A算法还是传统的A*算法呀
-
@2318266723 可以看Nav2中文网的文档,这是nav2支持的规划器,以及其具体实现方式

-
@小鱼 这个我看过的,但我不太清楚NavFn Planner这个插件中的A算法是最原始的还是经过改进过的双向A搜索
 源代码没看太懂 鱼总您知道吗
源代码没看太懂 鱼总您知道吗 -
我看过一轮navfn源码,感觉不是双向A*,是从goal点开始,计算到start点的potential值(代价值),看着是单向。有个算法讲解(文章是讲dijk的但是在源码里面,propdijk和propastar相比只是少了一个distance判断),看这个也许你能明白:https://blog.csdn.net/Neo11111/article/details/104645228