ROS2 humble cartographer建图tf延迟问题
-
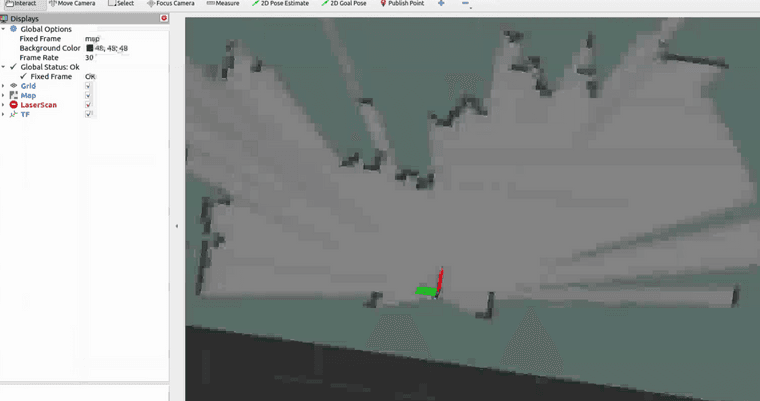
在把fishbot的仿真参数移植到真车的过程中遇到了这个TF延迟的问题,延迟时间大概是0.2秒左右;use_sim_time已经改为false,TF树是连起来的;
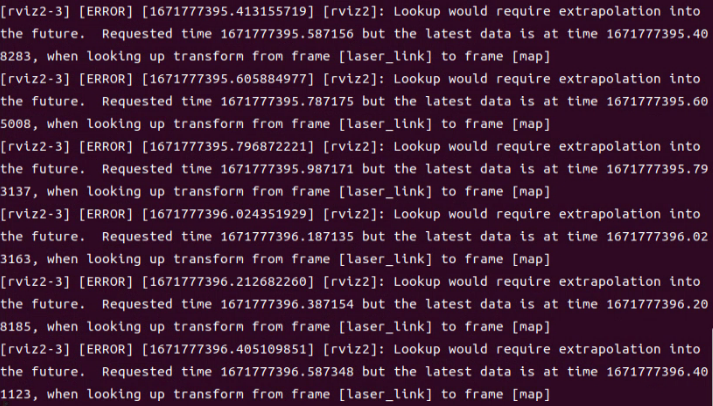
呈现的现象,在fiex frame为map时,接受不到激光的数据
-
你安装的是源码吗,还是用install 安装的。我在安装源码版本时编译出错

-
如果你安装的是源码版本,你可以尝试以下步骤来解决问题:
1.检查编译器版本是否与源码版本兼容;
2.检查系统是否满足源码版本的要求;
3.检查源码是否有错误;
4.检查是否有编译依赖库没有安装;
5.检查是否有编译参数没有正确设置;
6.尝试重新编译。
以上为生成回答,仅供参考~
-
(base) vico@wp:~/carto_ws$ colcon build --packages-up-to cartographer_ros
Starting >>> cartographer
Starting >>> cartographer_ros_msgs
--- stderr: cartographer_ros_msgs
CMake Error at /opt/ros/humble/share/rosidl_adapter/cmake/rosidl_adapt_interfaces.cmake:59 (message):
execute_process(/home/vico/miniconda3/bin/python3.10 -m rosidl_adapter
--package-name cartographer_ros_msgs --arguments-file
/home/vico/carto_ws/build/cartographer_ros_msgs/rosidl_adapter__arguments__cartographer_ros_msgs.json
--output-dir
/home/vico/carto_ws/build/cartographer_ros_msgs/rosidl_adapter/cartographer_ros_msgs
--output-file
/home/vico/carto_ws/build/cartographer_ros_msgs/rosidl_adapter/cartographer_ros_msgs.idls)
returned error code 1:Traceback (most recent call last):
File "/home/vico/miniconda3/lib/python3.10/runpy.py", line 196, in _run_module_as_main return _run_code(code, main_globals, None, File "/home/vico/miniconda3/lib/python3.10/runpy.py", line 86, in _run_code exec(code, run_globals) File "/opt/ros/humble/local/lib/python3.10/dist-packages/rosidl_adapter/__main__.py", line 19, in <module> sys.exit(main()) File "/opt/ros/humble/local/lib/python3.10/dist-packages/rosidl_adapter/main.py", line 53, in main abs_idl_file = convert_to_idl( File "/opt/ros/humble/local/lib/python3.10/dist-packages/rosidl_adapter/__init__.py", line 18, in convert_to_idl from rosidl_adapter.msg import convert_msg_to_idl File "/opt/ros/humble/local/lib/python3.10/dist-packages/rosidl_adapter/msg/__init__.py", line 16, in <module> from rosidl_adapter.resource import expand_template File "/opt/ros/humble/local/lib/python3.10/dist-packages/rosidl_adapter/resource/__init__.py", line 19, in <module> import emModuleNotFoundError: No module named 'em'
Call Stack (most recent call first):
-
/opt/ros/humble/share/rosidl_adapter/cmake/rosidl_adapt_interfaces.cmake:77 (rosidl_adapt_interfaces)
CMakeLists.txt:15 (rosidl_generate_interfaces)-- Configuring incomplete, errors occurred!
See also "/home/vico/carto_ws/build/cartographer_ros_msgs/CMakeFiles/CMakeOutput.log".
See also "/home/vico/carto_ws/build/cartographer_ros_msgs/CMakeFiles/CMakeError.log".
<<< Failed <<< cartographer_ros_msgs: 1.0 secSummary: 1 package finished [1 failed]
vico@wp:~/carto_ws$
</code>
I already tried to install <code>em</code> module with <code>pip3 install em</code> but it didn't work.
I am using Ubuntu 20.04, ROS2 Humble and Python 3.10
Any ideas?
以上为生成回答,仅供参考~
-
我是二进制安装的
-
@vico1999 conda退出来
-
@1561155732 我也遇到了同样的问题,请问您解决了吗