[FishBot教程] 9.0.3. 主控板固件烧录与配置
-
@小鱼 好吧,我打算再单买一块板~O(∩_∩)O哈哈~
-
@raoul 感谢支持
-
@小鱼 鱼哥 这个是什么问题啊 已经卸载过占用项了,也已经给了永久权限了。
用的是虚拟机ubuntu22.04 版本 ros2 humble版本 刚才有一次配置成功了 后来就一直串口打开异常
-
@法大 电源打开没有
-
@小鱼 打开了,我觉得可能是数据线的问题,所以我买了条数据线
-
@1020080005 请问该怎么解决?
-
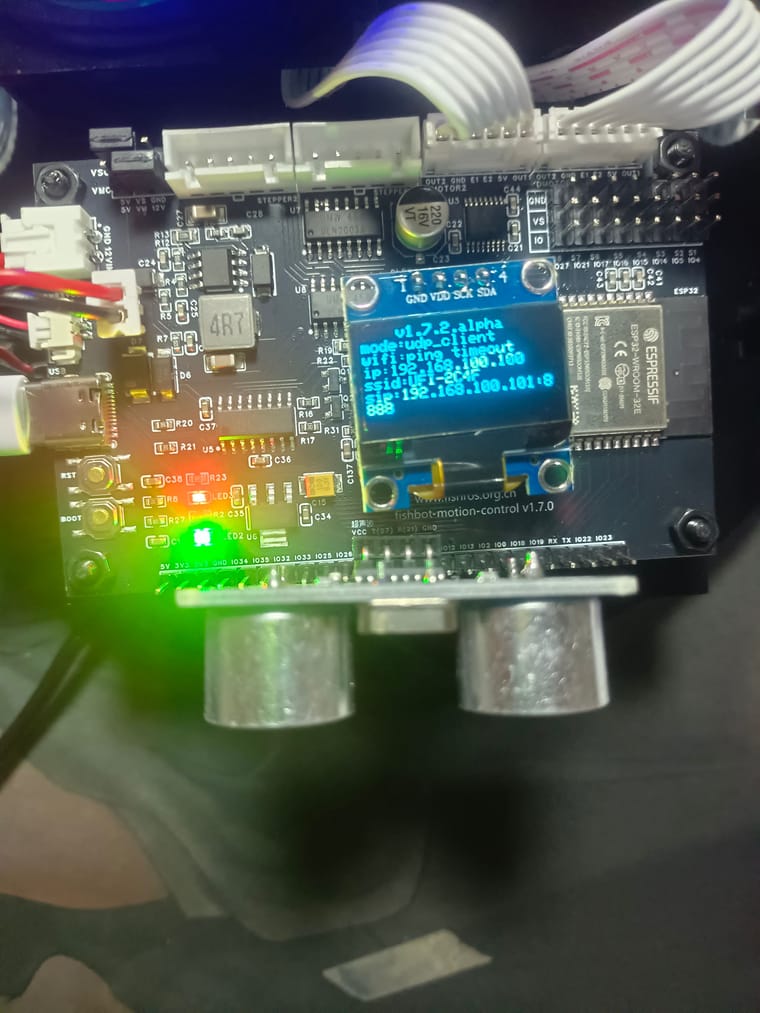
@小鱼 鱼哥显示屏上总是显示ping timeout什么原因啊
-
@法大 大概率是网络不通,可以看看9.0的视频
-
我对esp32并不熟悉,但是我按照教程用串口助手给esp32刷入了固件,我也不太清楚这些固件是什么,那么此时我是否必须还要去修改esp32的代码,使其能使用microROS。我照着快速上手的视频操作过,功能都是正常的。那么接下来,我只需要在电脑上编写ROS2的代码就行了吗@小鱼
-
@zxcpjp 可以看第九章的教程,如果不搞底层就直接跳过这些部分即可
-
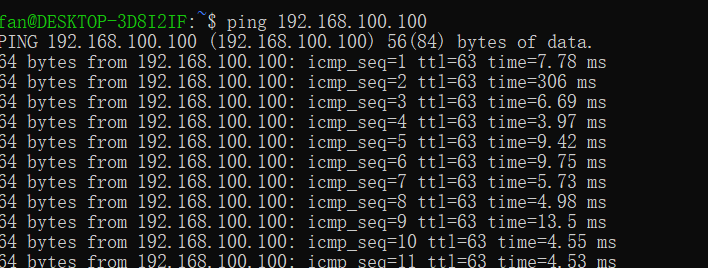
小鱼,请问电脑和小车都连上了wifi,ip正常,运行MicroROS服务后还是ping out 是什么情况

-
@921203724 我也遇到了这个问题
-
@小鱼 我用的是wsl,Ubuntu和ros版本跟小鱼的一样,电脑跟小车能ping通
还有个问题是我在wsl中 用 指令 ip a看不到电脑ip
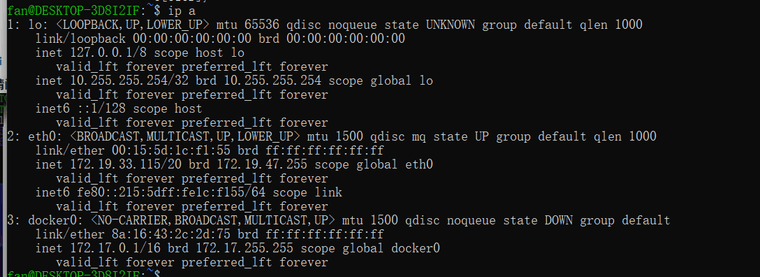
但是用cmd或者在设置里能看到
-
@fanjiahui wsl 好像 需要特殊设置,我也没搞很清楚
-
@fanjiahui 防火墙关闭了没有,你先想办法看看你的WSL是桥接还是NAT模式,你试试ifconfig
-

鱼哥,咋没信息发送过来?都配置好了呀,咋调试一下呢 -
@rare2580 wsl吗?
-
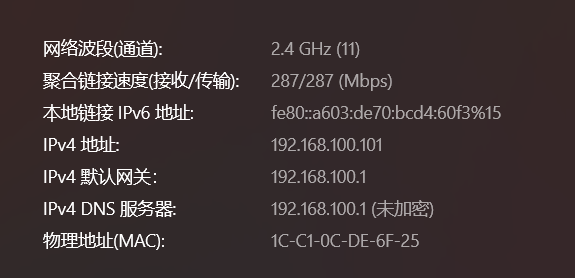
@小鱼 解决了,需要给wsl配置ip,让wsl的ip跟windows保持一致,之前我安装wsl的时候没配置
-

@小鱼 小鱼你好,我按照你的操作步骤来,为什么一直停留在这个配置没有接下来的消息配置出来 -
@tracehere 检查网络