[FishBot教程] 9.0.6. 雷达驱动及建图测试
-
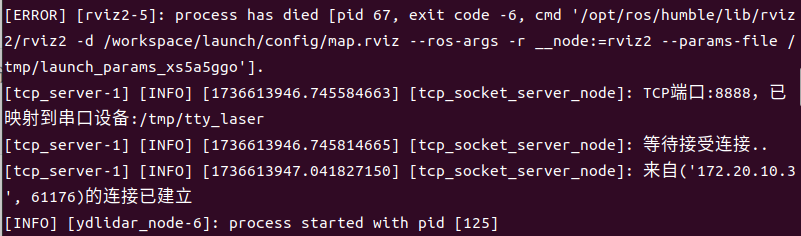
大佬,启动建图的时候打不开rviz是怎么回事:
[cartographer_node-3] [INFO] [1736613946.687195477] [cartographer logger]: I0111 16:45:46.000000 63 map_builder_bridge.cpp:136] Added trajectory with ID '0'.
[ERROR] [rviz2-5]: process has died [pid 67, exit code -6, cmd '/opt/ros/humble/lib/rviz2/rviz2 -d /workspace/launch/config/map.rviz --ros-args -r __node:=rviz2 --params-file /tmp/launch_params_xs5a5ggo'].
[tcp_server-1] [INFO] [1736613946.745584663] [tcp_socket_server_node]: TCP端口:8888,已映射到串口设备:/tmp/tty_laser -
-
@1270164455 单独可以打开
-
@1270164455 我觉得是你的网络或者配置问题
-
这是什么问题
-
@hxt22222 1是否正常,看一下视频教程
-
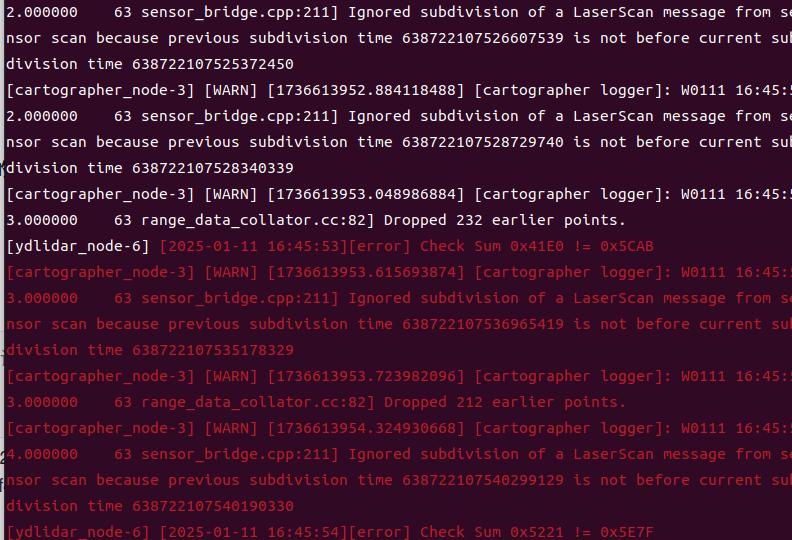
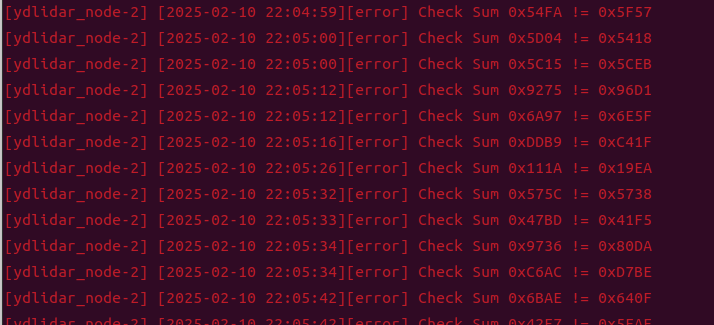
为何会出现checksum的问题呢?鱼佬
-
@490439406 一般情况下是网络原因造成的,可以尝试更换网络测试
-
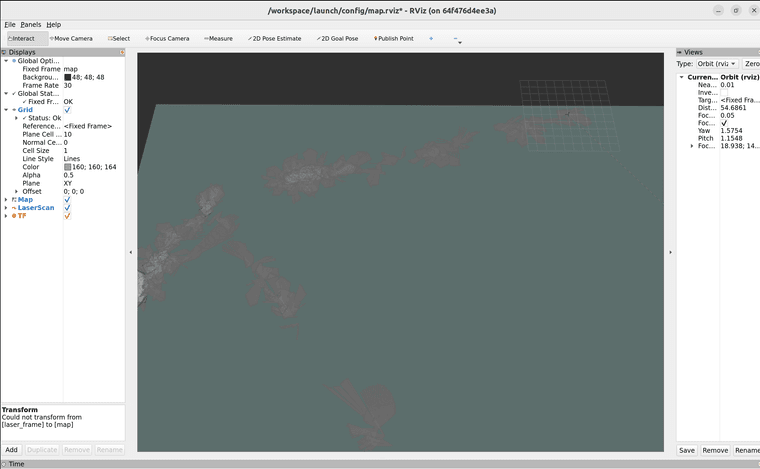
@小鱼 小鱼老师,有两个问题求教:
1.过程是我从桌面把机器人放到地面上,然后用键盘控制节点走了一小段,结果它整个建图都飘了,是因为历史记录的原因吗?那我应该怎样清除这些错乱数据呢?
 /home/greg/Pictures/Screenshots/Screenshot from 2025-02-18 17-22-55.png
/home/greg/Pictures/Screenshots/Screenshot from 2025-02-18 17-22-55.png
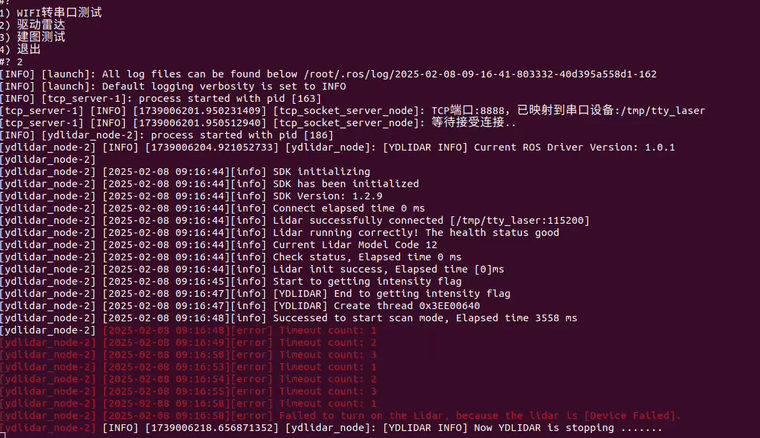
2.我在运行“驱动测试”、“建图测试”时都一直报一个check sum的error,且在运行建图测试时一直报下面的错误
 /home/greg/Pictures/Screenshots/Screenshot from 2025-02-18 17-23-33.png
/home/greg/Pictures/Screenshots/Screenshot from 2025-02-18 17-23-33.png求解!
-
@小鱼 还有一个问题,我的雷达频率很小,只有1-5hz,是哪个流程可能有问题吗?
 /home/greg/Pictures/Screenshots/Screenshot from 2025-02-18 17-33-20.png
/home/greg/Pictures/Screenshots/Screenshot from 2025-02-18 17-33-20.png -
@greg333 ctrl+c 重新运行看看
-
@小鱼 小鱼老师,重新运行了好几次都是这样。好像确认是网络的问题了:我家是一根有线网络,连接到2.4g的网关这边;然后还有一个5gwifi,通过网线连接到网关。
我两个网络都试过了,建图都飘的不行,我现在打算重新买个纯的2.4g路由器,通过网线连接网关,然后连接这个新的wifi试试。。 -
@greg333 ok
-
此回复已被删除! -
此回复已被删除! -
@2889839823
显示配置完成之后,显示屏上的ip是192.168.3.61 -
@2889839823 ip 是设备的ip,你要看 sip 服务 sererip
-
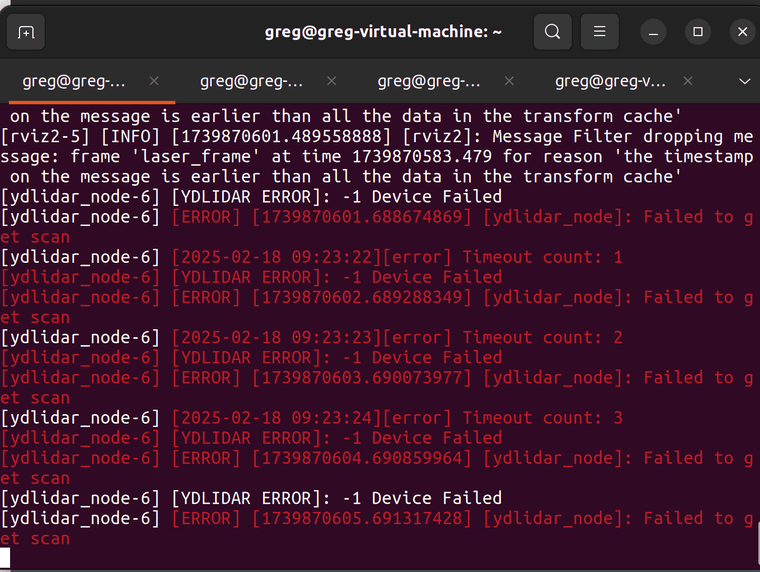
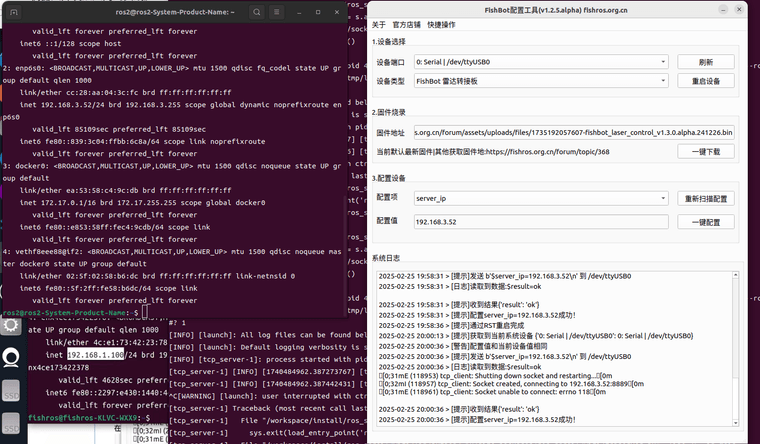
@小鱼 我使用docker 启动雷达驱动程序报错:
启动命令是
xhost + && sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -p 8889:8888 registry.cn-hangzhou.aliyuncs.com/fishros/fishbot_laser报错信息为:
[ydlidar_node-2] [2025-03-05 13:30:21][error] Check Sum 0x4ED6 != 0x5752
[ydlidar_node-2] [2025-03-05 13:30:23][error] Check Sum 0x234E != 0x0FA6
[ydlidar_node-2] [2025-03-05 13:30:37][error] Check Sum 0x8B68 != 0x8EA0
[ydlidar_node-2] [YDLIDAR ERROR]: -1 No error
[ydlidar_node-2] [ERROR] [1741181441.384116126] [ydlidar_node]: Failed to get scan我在我的老电脑上使用之前老版本的docker镜像是没这个问题的,但是我在新笔记本上用新的docker镜像就有这个问题,鱼哥这该如何解决呢。
-
@1539850877 偶尔一个没关系,如果频繁就检查一下网络情况
-
@小鱼 鱼哥 是一直有,然后使用3 建图测试的时候,小车的位置直接乱飘。但是我用之前的老版本的docker镜像是使用2进行建图测试的,就不会出现这个问题,可以完成建图的,是在相同网络环境下的同一台电脑执行的。
老版本的运行之后功能界面的显示:
最新版本的运行之后功能界面的显示: