[FishBot教程] 9.0.6. 雷达驱动及建图测试
-
@小鱼 好的,怎么加呀
-
@3120044269 公众号下方有二维码
-
@小鱼 加啦加啦,韓.
-
orange pi how to do
WARNING: The requested image's platform (linux/amd64) does not match the detected host platform (linux/arm64/v8) and no specific platform was requested
exec /startup.sh: exec format error -
@小鱼 我在四驱版使用时,雷达驱动第2步,驱动雷达报错,这步报错也会导致第3步报错,请问怎么回事呢?
-
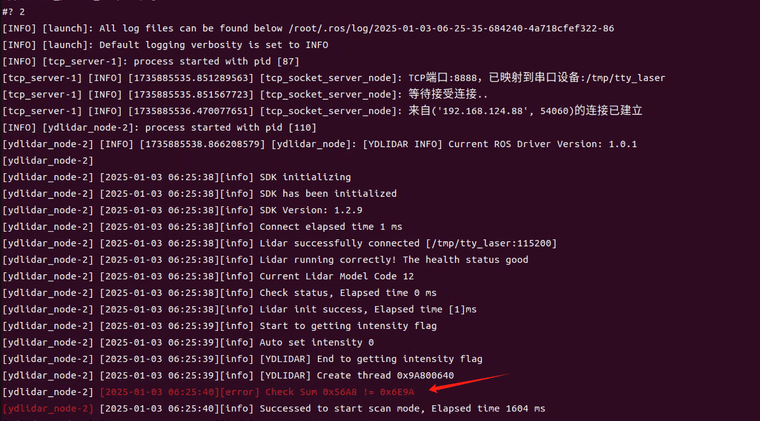
雷达驱动问题:
[ydlidar_node-2] [2025-01-03 11:31:56][error] Check Sum 0x68D7 != 0x1569
[ydlidar_node-2] [2025-01-03 11:31:59][error] Check Sum 0x5DEA != 0x1B19
[ydlidar_node-2] [YDLIDAR ERROR]: -1 No error
[ydlidar_node-2] [ERROR] [1735903928.417755598] [ydlidar_node]: Failed to get scan
[ydlidar_node-2] [2025-01-03 11:32:08][error] Timeout count: 1
[ydlidar_node-2] [2025-01-03 11:32:08][error] Check Sum 0x121C != 0x0233
[ydlidar_node-2] [2025-01-03 11:32:34][error] Check Sum 0xB856 != 0x868F
[ydlidar_node-2] [2025-01-03 11:32:34][error] Check Sum 0xBF44 != 0xD5E3
[ydlidar_node-2] [2025-01-03 11:32:35][error] Check Sum 0x53E4 != 0x51BD
[ydlidar_node-2] [2025-01-03 11:32:36][error] Check Sum 0xD974 != 0x87D3
[ydlidar_node-2] [2025-01-03 11:32:50][error] Check Sum 0x1E40 != 0x0FDE
[ydlidar_node-2] [YDLIDAR ERROR]: -1 Operation timed out
[ydlidar_node-2] [ERROR] [1735903972.437430773] [ydlidar_node]: Failed to get scan
[ydlidar_node-2] [2025-01-03 11:32:52][error] Timeout count: 1
[ydlidar_node-2] [YDLIDAR ERROR]: -1 Operation timed out
[ydlidar_node-2] [ERROR] [1735903973.437858047] [ydlidar_node]: Failed to get scan
[ydlidar_node-2] [2025-01-03 11:32:53][error] Timeout count: 2
[ydlidar_node-2] [2025-01-03 11:32:53][error] Check Sum 0x1A71 != 0x15AB
^C[WARNING] [launch]: user interrupted with ctrl-c (SIGINT)
[ydlidar_node-2] [INFO] [1735903974.800384796] [rclcpp]: signal_handler(signum=2)
[ERROR] [tcp_server-1]: process has died [pid 59, exit code -2, cmd '/workspace/install/ros_serail2wifi/lib/ros_serail2wifi/tcp_server --ros-args --params-file /tmp/launch_params_s0dvbmtk --params-file /tmp/launch_params_4auj8l85'].
[tcp_server-1] Traceback (most recent call last):
[tcp_server-1] File "/workspace/install/ros_serail2wifi/lib/ros_serail2wifi/tcp_server", line 33, in <module>
[tcp_server-1] sys.exit(load_entry_point('ros-serail2wifi==0.0.0', 'console_scripts', 'tcp_server')())
[tcp_server-1] File "/workspace/install/ros_serail2wifi/lib/python3.10/site-packages/ros_serail2wifi/tcpserver.py", line 76, in main
[tcp_server-1] node.run()
[tcp_server-1] File "/workspace/install/ros_serail2wifi/lib/python3.10/site-packages/ros_serail2wifi/tcpserver.py", line 49, in run雷达建图问题:
[ydlidar_node-6] [2025-01-03 11:26:54][error] Timeout count: 2
[ydlidar_node-6] [2025-01-03 11:26:54][error] Timeout count: 3
[cartographer_node-3] [INFO] [1735903614.135216721] [cartographer logger]: I0103 11:26:54.000000 63 node.cpp:569] Shutdown the subscriber of [scan]
[cartographer_node-3] [INFO] [1735903614.135283530] [cartographer logger]: I0103 11:26:54.000000 63 map_builder_bridge.cpp:152] Finishing trajectory with ID '0'...
[cartographer_node-3] [WARN] [1735903614.135465851] [cartographer logger]: W0103 11:26:54.000000 63 node.cpp:773] Can't run final optimization if there are one or more active trajectories. Trying to finish trajectory with ID 0 now.
[cartographer_node-3] [INFO] [1735903614.135520310] [cartographer logger]: I0103 11:26:54.000000 63 node.cpp:551] Trajectory 0 already pending to finish.
[cartographer_node-3] [INFO] [1735903614.135590080] [cartographer logger]: I0103 11:26:54.000000 63 map_builder_bridge.cpp:161] Running final trajectory optimization...
[cartographer_node-3] [INFO] [1735903614.136761950] [cartographer logger]: I0103 11:26:54.000000 116 pose_graph_2d.cc:538] Remaining work items in queue: 2
[cartographer_node-3] [INFO] [1735903614.136858631] [cartographer logger]: I0103 11:26:54.000000 116 constraint_builder_2d.cc:290] 21 computations resulted in 0 additional constraints.
[cartographer_node-3] [INFO] [1735903614.137078579] [cartographer logger]: I0103 11:26:54.000000 116 constraint_builder_2d.cc:292] Score histogram:
[cartographer_node-3] Count: 4 Min: 0.664706 Max: 0.9 Mean: 0.749173
[cartographer_node-3] [0.664706, 0.688235) ##### Count: 1 (25%) Total: 1 (25%)
[cartographer_node-3] [0.688235, 0.711765) ##### Count: 1 (25%) Total: 2 (50%)
[cartographer_node-3] [0.711765, 0.735294) ##### Count: 1 (25%) Total: 3 (75%)
[cartographer_node-3] [0.735294, 0.758824) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.758824, 0.782353) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.782353, 0.805882) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.805882, 0.829412) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.829412, 0.852941) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.852941, 0.876471) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.876471, 0.900000] ##### Count: 1 (25%) Total: 4 (100%)
[cartographer_node-3] [INFO] [1735903614.159599813] [cartographer logger]: I0103 11:26:54.000000 116 pose_graph_2d.cc:538] Remaining work items in queue: 1
[cartographer_node-3] [INFO] [1735903614.159673485] [cartographer logger]: I0103 11:26:54.000000 116 constraint_builder_2d.cc:290] 0 computations resulted in 0 additional constraints.
[cartographer_node-3] [INFO] [1735903614.160093412] [cartographer logger]: I0103 11:26:54.000000 116 constraint_builder_2d.cc:292] Score histogram:
[cartographer_node-3] Count: 4 Min: 0.664706 Max: 0.9 Mean: 0.749173
[cartographer_node-3] [0.664706, 0.688235) ##### Count: 1 (25%) Total: 1 (25%)
[cartographer_node-3] [0.688235, 0.711765) ##### Count: 1 (25%) Total: 2 (50%)
[cartographer_node-3] [0.711765, 0.735294) ##### Count: 1 (25%) Total: 3 (75%)
[cartographer_node-3] [0.735294, 0.758824) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.758824, 0.782353) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.782353, 0.805882) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.805882, 0.829412) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.829412, 0.852941) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.852941, 0.876471) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.876471, 0.900000] ##### Count: 1 (25%) Total: 4 (100%)
[cartographer_node-3] [INFO] [1735903614.175929395] [cartographer logger]: I0103 11:26:54.000000 115 constraint_builder_2d.cc:290] 0 computations resulted in 0 additional constraints.
[cartographer_node-3] [INFO] [1735903614.176097541] [cartographer logger]: I0103 11:26:54.000000 115 constraint_builder_2d.cc:292] Score histogram:
[cartographer_node-3] Count: 4 Min: 0.664706 Max: 0.9 Mean: 0.749173
[cartographer_node-3] [0.664706, 0.688235) ##### Count: 1 (25%) Total: 1 (25%)
[cartographer_node-3] [0.688235, 0.711765) ##### Count: 1 (25%) Total: 2 (50%)
[cartographer_node-3] [0.711765, 0.735294) ##### Count: 1 (25%) Total: 3 (75%)
[cartographer_node-3] [0.735294, 0.758824) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.758824, 0.782353) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.782353, 0.805882) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.805882, 0.829412) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.829412, 0.852941) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.852941, 0.876471) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.876471, 0.900000] ##### Count: 1 (25%) Total: 4 (100%)
[cartographer_node-3] [INFO] [1735903614.194124283] [cartographer logger]: I0103 11:26:54.000000 114 constraint_builder_2d.cc:290] 0 computations resulted in 0 additional constraints.
[cartographer_node-3] [INFO] [1735903614.194258427] [cartographer logger]: I0103 11:26:54.000000 114 constraint_builder_2d.cc:292] Score histogram:
[cartographer_node-3] Count: 4 Min: 0.664706 Max: 0.9 Mean: 0.749173
[cartographer_node-3] [0.664706, 0.688235) ##### Count: 1 (25%) Total: 1 (25%)
[cartographer_node-3] [0.688235, 0.711765) ##### Count: 1 (25%) Total: 2 (50%)
[cartographer_node-3] [0.711765, 0.735294) ##### Count: 1 (25%) Total: 3 (75%)
[cartographer_node-3] [0.735294, 0.758824) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.758824, 0.782353) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.782353, 0.805882) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.805882, 0.829412) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.829412, 0.852941) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.852941, 0.876471) Count: 0 (0%) Total: 3 (75%)
[cartographer_node-3] [0.876471, 0.900000] ##### Count: 1 (25%) Total: 4 (100%)
Optimizing: Done.
Optimizing: Done.
[ydlidar_node-6] [YDLIDAR ERROR]: -1 Device is not open
[ydlidar_node-6] [ERROR] [1735903615.059047626] [ydlidar_node]: Failed to get scan -
@jerry_88965294 我这也是这个问题,后面都是这样的报错,建图一直跳
-
@sunhao2202 您好,使用的是哪个版本的固件,网络质量如何
-
@sunhao2202 在 [FishBot教程] 9.0.6. 雷达驱动及建图测试 中说:
[ydlidar_node-2] [YDLIDAR ERROR]: -1 No error
[ydlidar_node-2] [ERROR] [1735903928.417755598] [ydlidar_node]: Failed to get scan
[ydlidar_node-2] [2025-01-03 11:32:08][error] Timeout count: 1
[ydlidar_node-2] [2025-01-03 11:32:08][error] Check Sum 0x121C != 0x0233
[ydlidar_node-2] [2025-01-03 11:32:34][error] Check Sum 0xB856 != 0x868F
[ydlidar_node-2] [2025-01-03 11:32:34][error] Check Sum 0xBF44 != 0xD5E3
[ydlidar_node-2] [2025-01-03 11:32:35][error] Check Sum 0x53E4 != 0x51BD
[ydlidar_node-2] [2025-01-03 11:32:36][error] Check Sum 0xD974 != 0x87D3
[ydlidar_node-2] [2025-01-03 11:32:50][error] Check Sum 0x1E40 != 0x0FDE
[ydlidar_node-2] [YDLIDAR ERROR]: -1 Operation timed out
[ydlidar_node-2] [ERROR] [1735903972.437430773] [ydlidar_node]: Failed to get scan
[ydlidar_node-2] [2025-01-03 11:32:52][error] Timeout count: 1
[ydlidar_node-2] [YDLIDAR ERROR]: -1 Operation timed out
[ydlidar_node-2] [ERROR] [1735903973.437858047] [ydlidar_node]: Failed to get scan
[ydlidar_node-2] [2025-01-03 11:32:53][error] Timeout count: 2
[ydlidar_node-2] [2025-01-03 11:32:53][error] Check Sum 0x1A71 != 0x15AB
^C[WARNING] [launch]: user interrupted with ctrl-c (SIGINT)
[ydlidar_node-2] [INFO] [1735903974.800384796] [rclcpp]: signal_handler(signum=2)
[ERROR] [tcp_server-1]: process has died [pid 59, exit code -2, cmd '/workspace/install/ros_serail2wifi/lib/ros_serail2wifi/tcp_server --ros-args --params-file /tmp/launch_params_s0dvbmtk --params-file /tmp/launch_params_4auj8l85'].
[tcp_server-1] Traceback (most recent call last):
[tcp_server-1] File "/workspace/install/ros_serail2wifi/lib/ros_serail2wifi/tcp_server", line 33, in <module>
[tcp_server-1] sys.exit(load_entry_point('ros-serail2wifi==0.0.0', 'console_scripts', 'tcp_server')())
[tcp_server-1] File "/workspace/install/ros_serail2wifi/lib/python3.10/site-packages/ros_serail2wifi/tcpserver.py", line 76, in main
[tcp_server-1] node.run()驱动正常后再尝试建图
-
@小鱼 烧录最新固件,我再试试