[FishBot教程]9.0.7. FishBot-Nav2导航测试
-
@165437424 最近会更新下雷达驱动,这个偶尔出现一次没问题
-
此回复已被删除! -
此回复已被删除! -
@1250372262 在 [FishBot教程]9.0.7. FishBot-Nav2导航测试 中说:
建图都是没有问题的了 然后我按照导航测试那块 启动了fishbot_bringup 然后把地图换了,启动导航的时候地图能加载出来,但是点击2D Pose Estimate的时候,界面没有反应,不像之前那样了,并且也不能导航
也是这个问题
-
@2768003759 导航的时候雷达驱动,底盘驱动之类的都不能关闭,先检查各个话题数据是否正常,然后检查tf是否正常
-
@小鱼 鱼哥启动microros错误什么原因
 之前都能成功
之前都能成功 -
@法大 右上角搜 bind error ,你不复制粘贴,我就不帮你搜了
-
 请问出现了什么问题
请问出现了什么问题 -
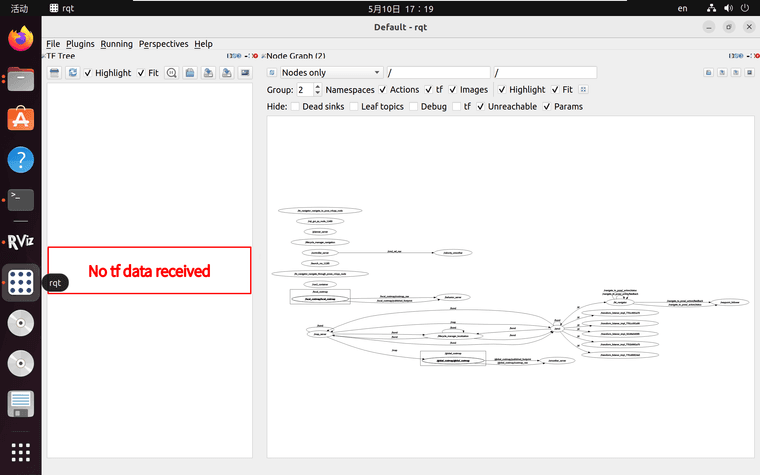
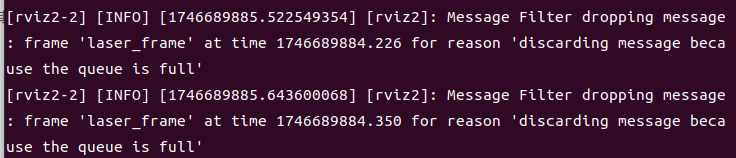
 使用ros2 launch fishbot_navigation2 navigation2.launch.py use_sim_time:=False指令终端出现这个问题,用的是git下来的例程。在rviz2中使用2D POSE ESTIMATE也无法看见雷达信息和代价地图。
使用ros2 launch fishbot_navigation2 navigation2.launch.py use_sim_time:=False指令终端出现这个问题,用的是git下来的例程。在rviz2中使用2D POSE ESTIMATE也无法看见雷达信息和代价地图。
单独launch bringup_quick.launch.py文件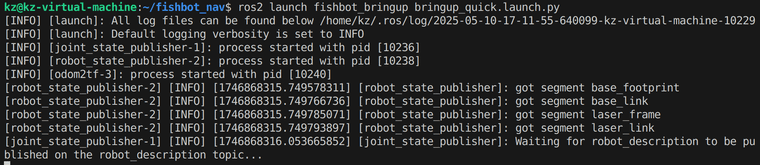
话题中没有robot_description话题,ros2 topic echo /odom没有返回消息,请问这是什么原因? -
-
@1142603834 1. 启动 agent
2. 检查 odom话题
3. 检查 odom 话题转 tf是否正常 -
@1142603834 在 [FishBot教程]9.0.7. FishBot-Nav2导航测试 中说:
ros2 topic echo /odom没有返回消息,请问这是什么原因?
agent 小车是否连接正常
-
@小鱼
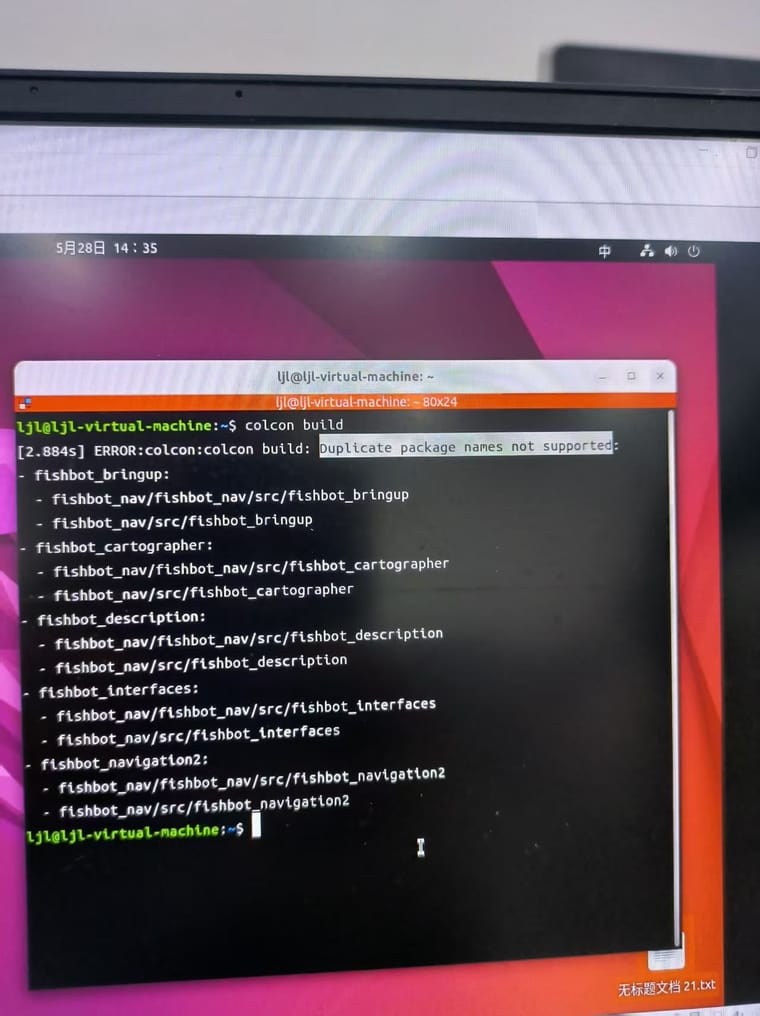 这种问题怎么解决啊,编译不了
这种问题怎么解决啊,编译不了 -
此回复已被删除! -
@小鱼 在 [FishBot教程]9.0.7. FishBot-Nav2导航测试 中说:
此时你可以使用rviz2的工具栏中的Nav2 Goal发送一个目标点,然后观察机器人运动即可。
在这一步的时候,在rviz发布目标点以后,上位机出现了路径,但是小车不是往目标点前进,而在原地转圈;同时使用键盘控制小车,用键盘X减小速度,感觉左轮的速度恒定不变不受x控制,不管用前进还是后退啥的,小车都原地转圈。这是为什么呢?但是可以看见右轮能受速度控制的 -
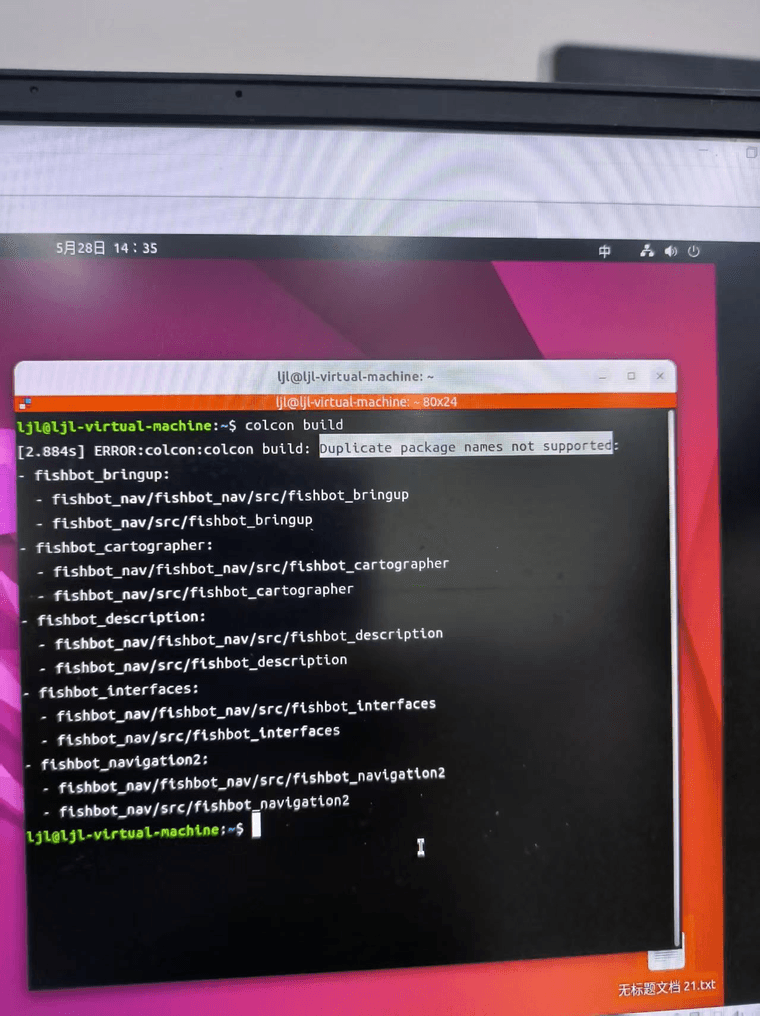 编译不了是为什么啊
编译不了是为什么啊 -
@lijialong 检查一下是不是包的名字重复了
-
@luqixuan 是重复的,它这个不能覆盖的吗,因为我改成了自己建的图,要重新编译,然后colcon build就是会显示会重复不让编译,我用另一台电脑就可以,不知道为什么