@小鱼 系统是ubuntu18,ros系统是eloquent
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
1281542951 发布的最新帖子
-
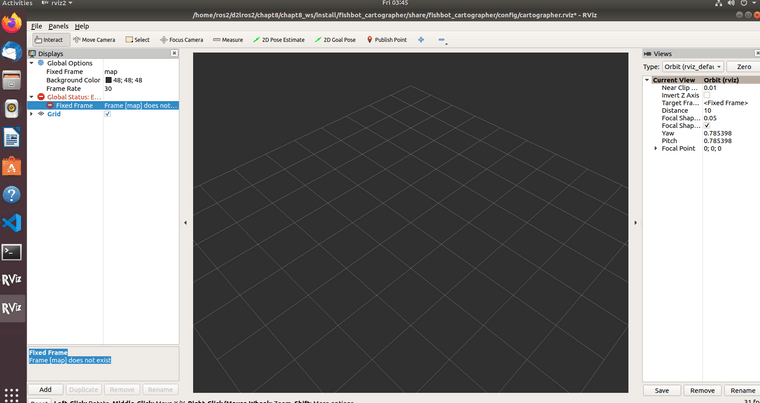
RE: 动手学运行cartographer.launch.py显示Fixed Frame Frame [map] does not exist发布在 综合问题
-
RE: 动手学运行cartographer.launch.py显示Fixed Frame Frame [map] does not exist发布在 综合问题
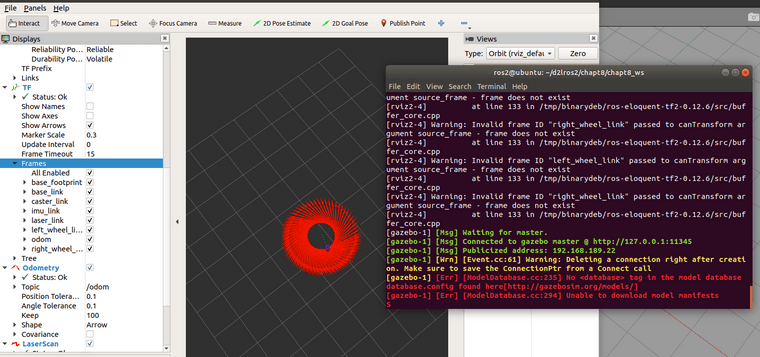
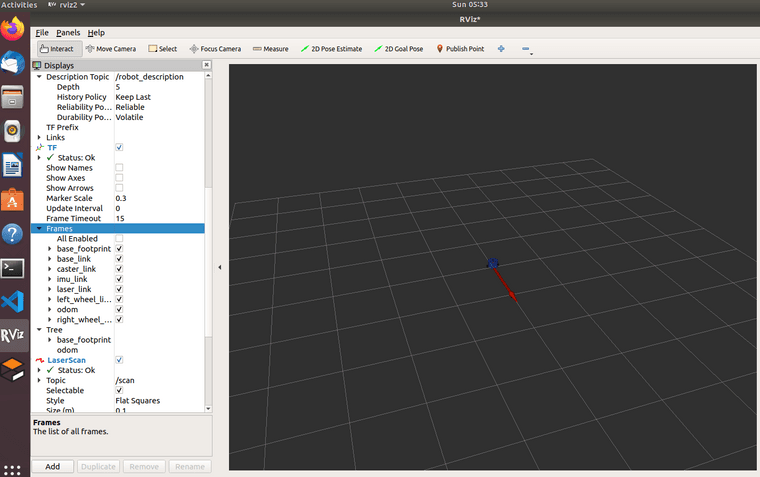
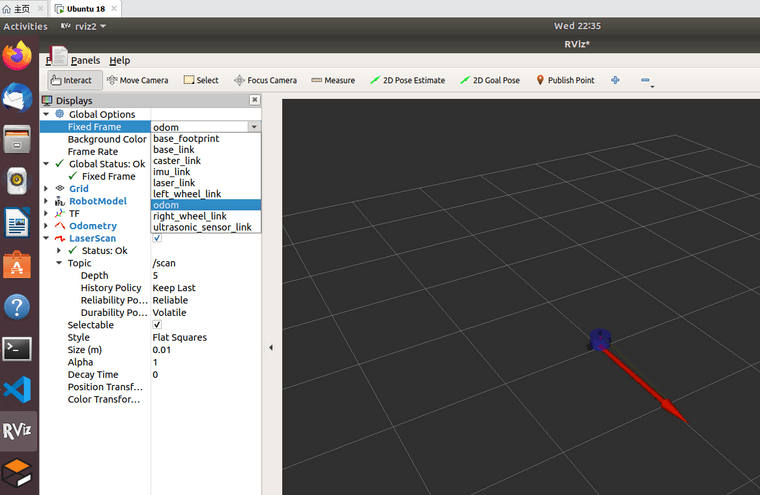
@小鱼 urdf文件用的是动手学ros2里面发的那个fishbot_gazebo,跟着操作运行了ros2 launch ...... rviz2没有显示雷达信息有放障碍物的,后面slam建图也找不到map,全程都是跟着文档操作的