@Dawn丶
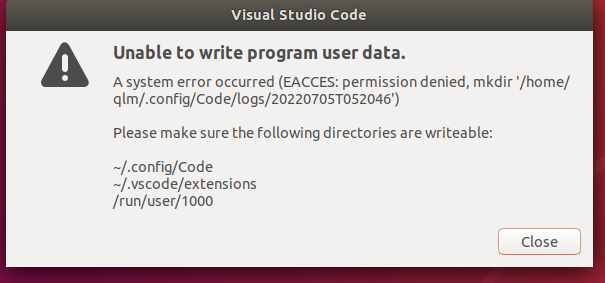
贴个解决方法:
把配置文件的root权限去掉就好了
cd ~/.config
sudo rm -rf ./Code/
@Dawn丶
贴个解决方法:
把配置文件的root权限去掉就好了
cd ~/.config
sudo rm -rf ./Code/
@小鱼 没事,您先忙,我现在都非常感谢您可以这么耐心地回复帮助我 。我自己去网上再找找解决方法(虽然大概率是不能顺利解决的
。我自己去网上再找找解决方法(虽然大概率是不能顺利解决的 )
)
@小鱼 好像依旧是同样的错误,我把完整日志贴上来给您看看。
qlm@ubuntu:~$ wget http://fishros.com/install -O fishros && . fishros
--2022-07-04 04:20:17-- http://fishros.com/install
Resolving fishros.com (fishros.com)... 139.9.131.171
Connecting to fishros.com (fishros.com)|139.9.131.171|:80... connected.
HTTP request sent, awaiting response... 301 Moved Permanently
Location: http://fishros.com/install/ [following]
--2022-07-04 04:20:18-- http://fishros.com/install/
Reusing existing connection to fishros.com:80.
HTTP request sent, awaiting response... 200 OK
Length: 543 [application/octet-stream]
Saving to: ‘fishros’
fishros 100%[===================>] 543 --.-KB/s in 0s
2022-07-04 04:20:18 (55.7 MB/s) - ‘fishros’ saved [543/543]
[sudo] password for qlm:
Reading package lists... Done
Building dependency tree
Reading state information... Done
Some packages could not be installed. This may mean that you have
requested an impossible situation or if you are using the unstable
distribution that some required packages have not yet been created
or been moved out of Incoming.
The following information may help to resolve the situation:
The following packages have unmet dependencies:
gsettings-desktop-schemas : Breaks: mutter (< 3.31.4) but 3.28.4+git20200505-0ubuntu18.04.2 is to be installed
E: Error, pkgProblemResolver::Resolve generated breaks, this may be caused by held packages.
--2022-07-04 04:20:23-- http://fishros.com/install/install1s/tools/base.py
Resolving fishros.com (fishros.com)... 139.9.131.171
Connecting to fishros.com (fishros.com)|139.9.131.171|:80... connected.
HTTP request sent, awaiting response... 200 OK
Length: 41481 (41K) [application/octet-stream]
Saving to: ‘/tmp/fishinstall/tools/base.py’
/tmp/fishinstall/to 100%[===================>] 40.51K --.-KB/s in 0.05s
2022-07-04 04:20:23 (787 KB/s) - ‘/tmp/fishinstall/tools/base.py’ saved [41481/41481]
Run CMD Task:[dpkg --print-architecture]
[-]Result:success
.-~~~~~~~~~-._ _.-~~~~~~~~~-.
__.' ~. .~ `.__
.'// 开卷有益 \./ 书山有路 \ `.
.'// 可以多看看小鱼的文章 | 关注公众号鱼香ROS \ `.
.'// .-~"~~~~-._ | _,-~~~~"~-. \`.
.'//.-" `-. | .-' "-.\`.
.'//______.============-.. \ | / ..-============.______\`.
.'______________________________\|/______________________________`
----------------------------------------------------------------------
RUN Choose Task:[请输入括号内的数字]
---众多工具,等君来用---
[1]:一键安装:ROS(支持ROS和ROS2,树莓派Jetson)
[11]:一键安装:ROS+Docker(支持所有版本ROS/ROS2)
[2]:一键安装:github桌面版(小鱼常用的github客户端)
[3]:一键配置:rosdep(小鱼的rosdepc,又快又好用)
[4]:一键配置:ROS环境(快速更新ROS环境设置,自动生成环境选择)
[5]:一键配置:系统源(更换系统源,支持全版本Ubuntu系统)
[6]:一键安装:nodejs
[7]:一键安装:VsCode开发工具
[8]:一键安装:Docker
[9]:一键安装:Cartographer(内测版v0.1)
[10]:一键安装:微信(可以在Linux上使用的微信)
[77]:测试模式:运行自定义工具测试
[0]:quit
请输入[]内的数字以选择:11
--2022-07-04 04:20:30-- http://fishros.com/install/install1s/tools/tool_install_ros_with_docker.py
Resolving fishros.com (fishros.com)... 139.9.131.171
Connecting to fishros.com (fishros.com)|139.9.131.171|:80... connected.
HTTP request sent, awaiting response... 200 OK
Length: 11266 (11K) [application/octet-stream]
Saving to: ‘/tmp/fishinstall/tools/tool_install_ros_with_docker.py’
/tmp/fishinstall/to 100%[===================>] 11.00K --.-KB/s in 0.008s
2022-07-04 04:20:30 (1.31 MB/s) - ‘/tmp/fishinstall/tools/tool_install_ros_with_docker.py’ saved [11266/11266]
--2022-07-04 04:20:30-- http://fishros.com/install/install1s/tools/tool_install_vscode.py
Resolving fishros.com (fishros.com)... 139.9.131.171
Connecting to fishros.com (fishros.com)|139.9.131.171|:80... connected.
HTTP request sent, awaiting response... 200 OK
Length: 1264 (1.2K) [application/octet-stream]
Saving to: ‘/tmp/fishinstall/tools/tool_install_vscode.py’
/tmp/fishinstall/to 100%[===================>] 1.23K --.-KB/s in 0s
2022-07-04 04:20:30 (131 MB/s) - ‘/tmp/fishinstall/tools/tool_install_vscode.py’ saved [1264/1264]
--2022-07-04 04:20:30-- http://fishros.com/install/install1s/tools/tool_install_docker.py
Resolving fishros.com (fishros.com)... 139.9.131.171
Connecting to fishros.com (fishros.com)|139.9.131.171|:80... connected.
HTTP request sent, awaiting response... 200 OK
Length: 2455 (2.4K) [application/octet-stream]
Saving to: ‘/tmp/fishinstall/tools/tool_install_docker.py’
/tmp/fishinstall/to 100%[===================>] 2.40K --.-KB/s in 0s
2022-07-04 04:20:31 (182 MB/s) - ‘/tmp/fishinstall/tools/tool_install_docker.py’ saved [2455/2455]
欢迎使用一键安装ROS-Docker版,支持所有版本ROS,本工具由作者小鱼提供
================================1.版本选择======================================
RUN Choose Task:[请输入括号内的数字]
请选择你要安装的ROS版本名称(请注意ROS1和ROS2区别):
[1]:noetic
[2]:humble
[3]:foxy
[4]:galactic
[5]:melodic
[6]:rolling
[7]:kinetic
[8]:eloquent
[9]:dashing
[10]:crystal
[11]:bouncy
[12]:ardent
[13]:lunar
[14]:indigo
[0]:quit
请输入[]内的数字以选择:5
你选择了melodic(ROS1),该版本目前状态:长期支持
================================2.安装Docker======================================
欢迎使用一键安装Docker,支持amd64和arm64架构系统,本工具由作者alyssa提供
开始根据系统架构,为你下载对应版本的docker~
Run CMD Task:[sudo apt update]
[-]Result:success ist --upgradable' to see them.se
Run CMD Task:[sudo apt install apt-transport-https ca-certificates curl software-properties-common -y]
[-]Result:success e and 1362 not upgraded.8).
Run CMD Task:[curl -fsSL https://mirrors.ustc.edu.cn/docker-ce/linux/ubuntu/gpg | sudo apt-key add -]
[-]Result:success
Run CMD Task:[sudo apt-key fingerprint 0EBFCD88]
[-]Result:success CE deb) docker@docker.com
Run CMD Task:[sudo add-apt-repository "deb [arch=amd64] https://mirrors.ustc.edu.cn/docker-ce/linux/ubuntu $(lsb_release -cs) stable" -y]
Hit:1 http://mirrors.aliyun.com/ubuntu focal InRelease
Hit:2 https://mirrors.ustc.edu.cn/docker-ce/linux/ubuntu bionic InRelease
Hit:3 http://mirrors.aliyun.com/ubuntu focal-security InRelease
Hit:4 http://mirrors.aliyun.com/ubuntu focal-updates InRelease
Hit:5 http://mirrors.aliyun.com/ubuntu focal-proposed InRelease
Hit:6 http://mirrors.aliyun.com/ubuntu focal-backports InRelease
Hit:7 http://mirrors.aliyun.com/ubuntu bionic InRelease
Hit:8 http://packages.microsoft.com/repos/code stable InRelease
Reading package lists... Done
下载完成,接下来升级apt索引~
Run CMD Task:[sudo apt update]
[-]Result:success ist --upgradable' to see them.se
开始安装最新版本docker CE~
Run CMD Task:[sudo apt --fix-broken install -y]
[-]Result:success e and 1362 not upgraded.
Run CMD Task:[sudo apt-cache search docker-ce ]
[-]Result:success cation container enginer engine
Run CMD Task:[sudo apt install docker-ce -y]
[-]Result:code:100 r (< 3.31.4) but 3.28.4+git20200505-0ubuntu18.04.2 is to be installed
Run CMD Task:[sudo apt-cache search docker-ce ]
[-]Result:success cation container enginer engine
Run CMD Task:[sudo aptitude install docker-ce -y]
[-]Result:code:1
Run CMD Task:[sudo groupadd docker]
[-]Result:code:9
Run CMD Task:[users]
[-]Result:success
Run CMD Task:[sudo gpasswd -a qlm docker]
[-]Result:success
安装完成,接下来你可以尝试使用docker --version指令测试是有正常回显~
=================3.下载镜像(该步骤因网络原因会慢一些,若失败请重试)==================
Run CMD Task:[sudo docker pull fishros2/ros:melodic-desktop-full ]
sudo: docker: command not found
Run CMD Task:[sudo docker pull fishros2/ros:melodic-desktop-full ]
sudo: docker: command not found
Run CMD Task:[sudo docker pull fishros2/ros:melodic-desktop-full ]
sudo: docker: command not found
================================4.生成容器======================================
请为你的melodic容器取个名字吧!
melodic4
收到名字melodic4
Run CMD Task:[users]
[-]Result:success
Run CMD Task:[sudo docker run -dit --name=melodic4 -v /home/qlm:/home/qlm -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -w /home/qlm fishros2/ros:melodic-desktop-full]
sudo: docker: command not found
Run CMD Task:[docker exec -it melodic4 /bin/bash -c "echo -e '
source /opt/ros/melodic/setup.bash' >> ~/.bashrc" ]
sh: 1: docker: not found
Run CMD Task:[xhost +local:]
non-network local connections being added to access control list
================================5.生成命令======================================
Run CMD Task:[users]
[-]Result:success
Run CMD Task:[sudo chmod 777 /home/qlm/.fishros/bin/melodic4]
================================6.生成使用工具======================================
RUN Choose Task:[请输入括号内的数字]
为方便后续使用容器,请选择使用方式,若不知道怎么选,推荐套餐1,若不需要则可以选退出:
[1]:套餐1:VsCode+插件(本地使用推荐)
[2]:套餐2:SSH-Service(远程使用推荐)
[0]:quit
请输入[]内的数字以选择:1
套餐1包含Vscode及其容器插件,开始安装。。
欢迎使用一键安装Vscode,本工具由作者小鱼提供
开始根据系统架构,为你下载对应版本的vscode~
Run CMD Task:[sudo wget http://vscode.cdn.azure.cn/stable/5554b12acf27056905806867f251c859323ff7e9/code_1.64.0-1643863948_amd64.deb -O /tmp/vscode.deb]
--2022-07-04 04:22:01-- http://vscode.cdn.azure.cn/stable/5554b12acf27056905806867f251c859323ff7e9/code_1.64.0-1643863948_amd64.deb
Resolving vscode.cdn.azure.cn (vscode.cdn.azure.cn)... 39.91.128.35
Connecting to vscode.cdn.azure.cn (vscode.cdn.azure.cn)|39.91.128.35|:80... connected.
HTTP request sent, awaiting response... 200 OK
Length: 79990376 (76M) [application/octet-stream]
Saving to: ‘/tmp/vscode.deb’
/tmp/vscode.deb 100%[==============================================================================================>] 76.28M 2.38MB/s in 34s
2022-07-04 04:22:35 (2.26 MB/s) - ‘/tmp/vscode.deb’ saved [79990376/79990376]
下载完成,接下来为你安装Vscode~
Run CMD Task:[sudo dpkg -i /tmp/vscode.deb]
[-]Result:success (1.9-2) .....tu3.18.04.2) ....)
Run CMD Task:[rm -rf /tmp/vscode.deb]
[-]Result:success
安装完成~
Run CMD Task:[code --install-extension ms-vscode-remote.remote-containers --user-data-dir]
Installing extensions...
Extension 'ms-vscode-remote.remote-containers' v0.238.3 is already installed. Use '--force' option to update to latest version or provide '@<version>' to install a specific version, for example: 'ms-vscode-remote.remote-containers@1.2.3'.
===========================后续使用指令=================================
后续可在任意终端输入melodic4来启动/停止/测试/删除容器
==============================文件存储位置===============================
你的主目录已经和容器的对应目录做了映射
==============================问题反馈&&更新讨论=============================
请访问社区的一键安装版块:https://fishros.org.cn/forum/topic/112
欢迎加入机器人学习交流QQ群:139707339(入群口令:一键安装)
如在使用过程中遇到问题,请打开:https://fishros.org.cn/forum 进行反馈
qlm@ubuntu:~$ melodic4
请输入指令控制melodic4: 重启(r) 进入(e) 启动(s) 关闭(c) 删除(d) 测试(t):
t
/home/qlm/.fishros/bin/melodic4: line 10: docker: command not found
@小鱼
qlm@ubuntu:~$ sudo apt install docker-ce -y
[sudo] password for qlm:
Reading package lists... Done
Building dependency tree
Reading state information... Done
Some packages could not be installed. This may mean that you have
requested an impossible situation or if you are using the unstable
distribution that some required packages have not yet been created
or been moved out of Incoming.
The following information may help to resolve the situation:
The following packages have unmet dependencies:
gnome-session-common : Breaks: eog (< 3.36.0) but 3.28.1-1 is to be installed
gsettings-desktop-schemas : Breaks: mutter (< 3.31.4) but 3.28.4+git20200505-0ubuntu18.04.2 is to be installed
E: Error, pkgProblemResolver::Resolve generated breaks, this may be caused by held packages.
@小鱼
qlm@ubuntu:~$ wget http://fishros.com/install -O fishros && . fishros
--2022-07-04 03:38:27-- http://fishros.com/install
Resolving fishros.com (fishros.com)... 139.9.131.171
Connecting to fishros.com (fishros.com)|139.9.131.171|:80... connected.
HTTP request sent, awaiting response... 301 Moved Permanently
Location: http://fishros.com/install/ [following]
--2022-07-04 03:38:27-- http://fishros.com/install/
Reusing existing connection to fishros.com:80.
HTTP request sent, awaiting response... 200 OK
Length: 543 [application/octet-stream]
Saving to: ‘fishros’
fishros 100%[===================>] 543 --.-KB/s in 0s
2022-07-04 03:38:27 (88.2 MB/s) - ‘fishros’ saved [543/543]
[sudo] password for qlm:
Reading package lists... Done
Building dependency tree
Reading state information... Done
Some packages could not be installed. This may mean that you have
requested an impossible situation or if you are using the unstable
distribution that some required packages have not yet been created
or been moved out of Incoming.
The following information may help to resolve the situation:
The following packages have unmet dependencies:
gsettings-desktop-schemas : Breaks: mutter (< 3.31.4) but 3.28.4+git20200505-0ubuntu18.04.2 is to be installed
E: Error, pkgProblemResolver::Resolve generated breaks, this may be caused by held packages.
--2022-07-04 03:38:32-- http://fishros.com/install/install1s/tools/base.py
Resolving fishros.com (fishros.com)... 139.9.131.171
Connecting to fishros.com (fishros.com)|139.9.131.171|:80... connected.
HTTP request sent, awaiting response... 200 OK
Length: 39925 (39K) [application/octet-stream]
Saving to: ‘/tmp/fishinstall/tools/base.py’
/tmp/fishinstall/to 100%[===================>] 38.99K --.-KB/s in 0.05s
2022-07-04 03:38:32 (752 KB/s) - ‘/tmp/fishinstall/tools/base.py’ saved [39925/39925]
Run CMD Task:[dpkg --print-architecture]
[-]Result:success
.-~~~~~~~~~-._ _.-~~~~~~~~~-.
__.' ~. .~ `.__
.'// 开卷有益 \./ 书山有路 \ `.
.'// 可以多看看小鱼的文章 | 关注公众号鱼香ROS \ `.
.'// .-~"~~~~-._ | _,-~~~~"~-. \`.
.'//.-" `-. | .-' "-.\`.
.'//______.============-.. \ | / ..-============.______\`.
.'______________________________\|/______________________________`
----------------------------------------------------------------------
RUN Choose Task:[请输入括号内的数字]
---众多工具,等君来用---
[1]:一键安装:ROS(支持ROS和ROS2,树莓派Jetson)
[11]:一键安装:ROS+Docker(支持所有版本ROS/ROS2)
[2]:一键安装:github桌面版(小鱼常用的github客户端)
[3]:一键配置:rosdep(小鱼的rosdepc,又快又好用)
[4]:一键配置:ROS环境(快速更新ROS环境设置,自动生成环境选择)
[5]:一键配置:系统源(更换系统源,支持全版本Ubuntu系统)
[6]:一键安装:nodejs
[7]:一键安装:VsCode开发工具
[8]:一键安装:Docker
[9]:一键安装:Cartographer(内测版v0.1)
[10]:一键安装:微信(可以在Linux上使用的微信)
[77]:测试模式:运行自定义工具测试
[0]:quit
请输入[]内的数字以选择:11
--2022-07-04 03:38:40-- http://fishros.com/install/install1s/tools/tool_install_ros_with_docker.py
Resolving fishros.com (fishros.com)... 139.9.131.171
Connecting to fishros.com (fishros.com)|139.9.131.171|:80... connected.
HTTP request sent, awaiting response... 200 OK
Length: 11266 (11K) [application/octet-stream]
Saving to: ‘/tmp/fishinstall/tools/tool_install_ros_with_docker.py’
/tmp/fishinstall/to 100%[===================>] 11.00K --.-KB/s in 0s
2022-07-04 03:38:40 (56.5 MB/s) - ‘/tmp/fishinstall/tools/tool_install_ros_with_docker.py’ saved [11266/11266]
--2022-07-04 03:38:40-- http://fishros.com/install/install1s/tools/tool_install_vscode.py
Resolving fishros.com (fishros.com)... 139.9.131.171
Connecting to fishros.com (fishros.com)|139.9.131.171|:80... connected.
HTTP request sent, awaiting response... 200 OK
Length: 1264 (1.2K) [application/octet-stream]
Saving to: ‘/tmp/fishinstall/tools/tool_install_vscode.py’
/tmp/fishinstall/to 100%[===================>] 1.23K --.-KB/s in 0s
2022-07-04 03:38:40 (131 MB/s) - ‘/tmp/fishinstall/tools/tool_install_vscode.py’ saved [1264/1264]
--2022-07-04 03:38:40-- http://fishros.com/install/install1s/tools/tool_install_docker.py
Resolving fishros.com (fishros.com)... 139.9.131.171
Connecting to fishros.com (fishros.com)|139.9.131.171|:80... connected.
HTTP request sent, awaiting response... 200 OK
Length: 2401 (2.3K) [application/octet-stream]
Saving to: ‘/tmp/fishinstall/tools/tool_install_docker.py’
/tmp/fishinstall/to 100%[===================>] 2.34K --.-KB/s in 0s
2022-07-04 03:38:40 (217 MB/s) - ‘/tmp/fishinstall/tools/tool_install_docker.py’ saved [2401/2401]
欢迎使用一键安装ROS-Docker版,支持所有版本ROS,本工具由作者小鱼提供
================================1.版本选择======================================
RUN Choose Task:[请输入括号内的数字]
请选择你要安装的ROS版本名称(请注意ROS1和ROS2区别):
[1]:noetic
[2]:humble
[3]:foxy
[4]:galactic
[5]:melodic
[6]:rolling
[7]:kinetic
[8]:eloquent
[9]:dashing
[10]:crystal
[11]:bouncy
[12]:ardent
[13]:lunar
[14]:indigo
[0]:quit
请输入[]内的数字以选择:5
你选择了melodic(ROS1),该版本目前状态:长期支持
================================2.安装Docker======================================
欢迎使用一键安装Docker,支持amd64和arm64架构系统,本工具由作者alyssa提供
开始根据系统架构,为你下载对应版本的docker~
Run CMD Task:[sudo apt update]
[|]Get:10 http://mirrors.aliyun.com/ubuntu focal-security/main amd64 Packages [1[-]Get:11 http://mirrors.aliyun.com/ubuntu focal-security/main amd64 DEP-11 Meta[/]Get:12 http://mirrors.aliyun.com/ubuntu focal-security/universe amd64 DEP-11 []Get:13 http://mirrors.aliyun.com/ubuntu focal-security/multiverse amd64 DEP-1[|]Get:14 http://mirrors.aliyun.com/ubuntu focal-updates/main amd64 DEP-11 Metad[-]Get:15 http://mirrors.aliyun.com/ubuntu focal-updates/universe amd64 DEP-11 M[/]Get:16 http://mirrors.aliyun.com/ubuntu focal-updates/multiverse amd64 DEP-11[]Get:17 http://mirrors.aliyun.com/ubuntu focal-proposed/restricted Sources [13[-]Get:19 http://mirrors.aliyun.com/ubuntu focal-proposed/universe Sources [24.3[/]Get:20 http://mirrors.aliyun.com/ubuntu focal-proposed/main i386 Packages [74[]Get:21 http://mirrors.aliyun.com/ubuntu focal-proposed/main amd64 Packages [3[|]Get:22 http://mirrors.aliyun.com/ubuntu focal-proposed/main Translation-en [6[-]Get:23 http://mirrors.aliyun.com/ubuntu focal-proposed/main amd64 DEP-11 Meta[/]Get:24 http://mirrors.aliyun.com/ubuntu focal-proposed/restricted amd64 Packa[]Get:25 http://mirrors.aliyun.com/ubuntu focal-proposed/restricted Translation[|]Get:26 http://mirrors.aliyun.com/ubuntu focal-proposed/universe amd64 Package[-]Get:27 http://mirrors.aliyun.com/ubuntu focal-proposed/universe i386 Packages[/]Get:28 http://mirrors.aliyun.com/ubuntu focal-proposed/universe Translation-e[]Get:29 http://mirrors.aliyun.com/ubuntu focal-proposed/universe amd64 DEP-11 [|]Get:30 http://mirrors.aliyun.com/ubuntu focal-proposed/multiverse amd64 DEP-1[-]Get:31 http://mirrors.aliyun.com/ubuntu focal-backports/main amd64 DEP-11 Met[/]Get:32 http://mirrors.aliyun.com/ubuntu focal-backports/universe amd64 DEP-11[-]Result:success ist --upgradable' to see them.
Run CMD Task:[sudo apt install apt-transport-https ca-certificates curl software-properties-common -y]
[-]Result:success e and 1362 not upgraded.8).
Run CMD Task:[curl -fsSL https://mirrors.ustc.edu.cn/docker-ce/linux/ubuntu/gpg | sudo apt-key add -]
[-]Result:success
Run CMD Task:[sudo apt-key fingerprint 0EBFCD88]
[-]Result:success CE deb) docker@docker.com
Run CMD Task:[sudo add-apt-repository "deb [arch=amd64] https://mirrors.ustc.edu.cn/docker-ce/linux/ubuntu $(lsb_release -cs) stable" -y]
Hit:1 http://mirrors.aliyun.com/ubuntu focal InRelease
Hit:2 https://mirrors.ustc.edu.cn/docker-ce/linux/ubuntu bionic InRelease
Hit:3 http://packages.microsoft.com/repos/code stable InRelease
Hit:4 http://mirrors.aliyun.com/ubuntu focal-security InRelease
Hit:5 http://mirrors.aliyun.com/ubuntu focal-updates InRelease
Hit:6 http://mirrors.aliyun.com/ubuntu focal-proposed InRelease
Hit:7 http://mirrors.aliyun.com/ubuntu focal-backports InRelease
Hit:8 http://mirrors.aliyun.com/ubuntu bionic InRelease
Reading package lists... Done
下载完成,接下来升级apt索引~
Run CMD Task:[sudo apt update]
[-]Result:success ist --upgradable' to see them.se
开始安装最新版本docker CE~
Run CMD Task:[sudo apt --fix-broken install -y]
[-]Result:success e and 1362 not upgraded.
Run CMD Task:[sudo apt install docker-ce -y]
[-]Result:code:100 r (< 3.31.4) but 3.28.4+git20200505-0ubuntu18.04.2 is to be installed
Run CMD Task:[sudo groupadd docker]
[-]Result:code:9
Run CMD Task:[users]
[-]Result:success
Run CMD Task:[sudo gpasswd -a qlm docker]
[-]Result:success
安装完成,接下来你可以尝试使用docker --version指令测试是有正常回显~
=================3.下载镜像(该步骤因网络原因会慢一些,若失败请重试)==================
Run CMD Task:[sudo docker pull fishros2/ros:melodic-desktop-full ]
sudo: docker: command not found
Run CMD Task:[sudo docker pull fishros2/ros:melodic-desktop-full ]
sudo: docker: command not found
Run CMD Task:[sudo docker pull fishros2/ros:melodic-desktop-full ]
sudo: docker: command not found
================================4.生成容器======================================
请为你的melodic容器取个名字吧!
melodic3
收到名字melodic3
Run CMD Task:[users]
[-]Result:success
Run CMD Task:[sudo docker run -dit --name=melodic3 -v /home/qlm:/home/qlm -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -w /home/qlm fishros2/ros:melodic-desktop-full]
sudo: docker: command not found
Run CMD Task:[docker exec -it melodic3 /bin/bash -c "echo -e '
source /opt/ros/melodic/setup.bash' >> ~/.bashrc" ]
sh: 1: docker: not found
Run CMD Task:[xhost +local:]
non-network local connections being added to access control list
================================5.生成命令======================================
Run CMD Task:[users]
[-]Result:success
Run CMD Task:[sudo chmod 777 /home/qlm/.fishros/bin/melodic3]
================================6.生成使用工具======================================
RUN Choose Task:[请输入括号内的数字]
为方便后续使用容器,请选择使用方式,若不知道怎么选,推荐套餐1,若不需要则可以选退出:
[1]:套餐1:VsCode+插件(本地使用推荐)
[2]:套餐2:SSH-Service(远程使用推荐)
[0]:quit
请输入[]内的数字以选择:1
套餐1包含Vscode及其容器插件,开始安装。。
欢迎使用一键安装Vscode,本工具由作者小鱼提供
开始根据系统架构,为你下载对应版本的vscode~
Run CMD Task:[sudo wget http://vscode.cdn.azure.cn/stable/5554b12acf27056905806867f251c859323ff7e9/code_1.64.0-1643863948_amd64.deb -O /tmp/vscode.deb]
--2022-07-04 03:40:13-- http://vscode.cdn.azure.cn/stable/5554b12acf27056905806867f251c859323ff7e9/code_1.64.0-1643863948_amd64.deb
Resolving vscode.cdn.azure.cn (vscode.cdn.azure.cn)... 39.91.128.35
Connecting to vscode.cdn.azure.cn (vscode.cdn.azure.cn)|39.91.128.35|:80... connected.
HTTP request sent, awaiting response... 200 OK
Length: 79990376 (76M) [application/octet-stream]
Saving to: ‘/tmp/vscode.deb’
/tmp/vscode.deb 100%[==============================================================================================>] 76.28M 2.10MB/s in 34s
2022-07-04 03:40:48 (2.26 MB/s) - ‘/tmp/vscode.deb’ saved [79990376/79990376]
下载完成,接下来为你安装Vscode~
Run CMD Task:[sudo dpkg -i /tmp/vscode.deb]
[-]Result:success (1.9-2) .....tu3.18.04.2) ....)
Run CMD Task:[rm -rf /tmp/vscode.deb]
[-]Result:success
安装完成~
Run CMD Task:[code --install-extension ms-vscode-remote.remote-containers --user-data-dir]
Installing extensions...
Extension 'ms-vscode-remote.remote-containers' v0.238.3 is already installed. Use '--force' option to update to latest version or provide '@<version>' to install a specific version, for example: 'ms-vscode-remote.remote-containers@1.2.3'.
===========================后续使用指令=================================
后续可在任意终端输入melodic3来启动/停止/测试/删除容器
==============================文件存储位置===============================
你的主目录已经和容器的对应目录做了映射
==============================问题反馈&&更新讨论=============================
请访问社区的一键安装版块:https://fishros.org.cn/forum/topic/112
欢迎加入机器人学习交流QQ群:139707339(入群口令:一键安装)
如在使用过程中遇到问题,请打开:https://fishros.org.cn/forum 进行反馈
qlm@ubuntu:~$ docker --version
Command 'docker' not found, but can be installed with:
sudo snap install docker # version 20.10.14, or
sudo apt install docker.io # version 20.10.12-0ubuntu2~20.04.1
See 'snap info docker' for additional versions.
qlm@ubuntu:~$ melodic3
请输入指令控制melodic3: 重启(r) 进入(e) 启动(s) 关闭(c) 删除(d) 测试(t):
t
/home/qlm/.fishros/bin/melodic3: line 10: docker: command not found
@小鱼 Linux ubuntu 5.4.0-84-generic #94~18.04.1-Ubuntu SMP Thu Aug 26 23:17:46 UTC 2021 x86_64 x86_64 x86_64 GNU/Linux
版本:VMware 虚拟机 Ubuntu18.04
源:国内阿里云
根据小鱼的视频教程步骤《一键安装+Docker》操作,提示已成功创建melodic1 容器:
请输入指令控制melodic1: 重启(r) 进入(e) 启动(s) 关闭(c) 删除(d) 测试(t):
t
/home/qlm/.fishros/bin/melodic1: line 10: docker: command not found
提示错误:docker: command not found,同时也没有成功安装上VScode。
尝试操作1:重新再来一次“一键安装”,并且也提示成功创建melodic2容器,但是依旧出现了上面的错误。
尝试操作2:原本以为是因为没有配置环境变量,系统识别不了docker命令,所以会报错,但是根据CSDN的修改方案去走,还是没能解决问题。
希望大家给点解决方案,谢谢!