@Lorry 不好意思,打扰了。我重新下载代码,编译之后就没问题了。
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
运动男孩 发布的帖子
-
RE: ros2 nav2 bt_navigator-7 process has died发布在 Nav2
@小鱼 不好意思,之前没有说清楚,是ROS2,导航的时候报下面的错误
[rviz2-10] [WARN] [1672714773.264824298] [rcl.logging_rosout]: Publisher already registered for provided node name. If this is due to multiple nodes with the same name then all logs for that logger name will go out over the existing publisher. As soon as any node with that name is destructed it will unregister the publisher, preventing any further logs for that name from being published on the rosout topic.
[rviz2-10] [ERROR] [1672714773.352966602] [rviz2]: Vertex Program:rviz/glsl120/indexed_8bit_image.vert Fragment Program:rviz/glsl120/indexed_8bit_image.frag GLSL link result :
[rviz2-10] active samplers with a different type refer to the same texture image unit[ERROR] [bt_navigator-7]: process has died [pid 2818, exit code -6, cmd '/home/longto/tb2_ws/install/nav2_bt_navigator/lib/nav2_bt_navigator/bt_navigator --ros-args -r __node:=bt_navigator --params-file /tmp/tmp6wu_tntj -r /tf:=tf -r /tf_static:=tf_static'].
-
ros2 nav2 bt_navigator-7 process has died发布在 Nav2
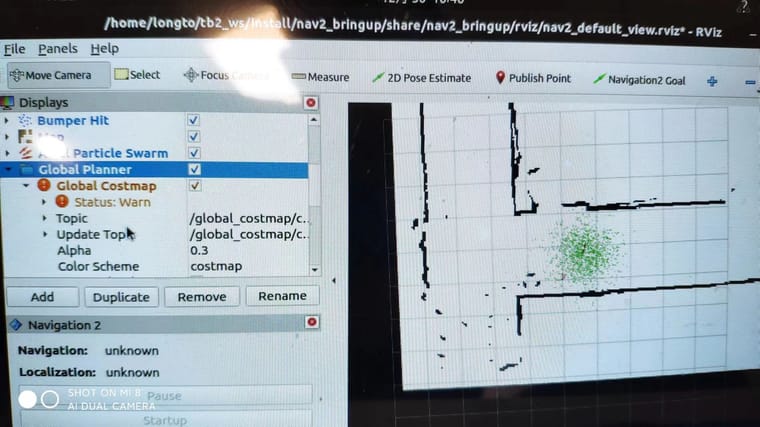
您好,我跑实际机器人导航,跑的是turtlebot3的源码,加载自己的地图,遇到下面的问题,地图能加载,但是没有出现global costmap 和local costmap。检查过雷达数据和历程计的数据都没有问题,使用cartographer能建图。请问一下还有什么其他的原因会出现这种情况呢?非常期待您的帮助,谢谢
-
RE: 实际机器人运行NAV2时,报 No Valid trajectories out of 109!该如何解决呢?发布在 Nav2
已经解决了,不好意思,麻烦您了。问题是我把里程计发布的twist.linear.x 和twist.angular.z的单位搞错了,这个单位本来是m/s 和弧度/s,我把他们分别设置成了mm/s和角度/s,所以报了上面的错误。nav2导航的速度参考的是odom.twist发布的速度,这个速度太离谱的话就会报上面那个错误。
-
RE: 实际机器人运行NAV2时,报 No Valid trajectories out of 109!该如何解决呢?发布在 Nav2
@小鱼 我在调用nav2时的tf变换 map->odom->base_link->base_footprint->laser_link,但是还是报上面的问题
-
实际机器人运行NAV2时,报 No Valid trajectories out of 109!该如何解决呢?发布在 Nav2
实际机器人启动了odom节点,激光雷达节点,数据都ok,能在实际机器人上运行cartographer并成功建图
tf为 odom->base_link->base_foot_print->laser_link.
但是运行nav2时报上面的错误,机器人的表现为在原地转了转就不动了,重复提示
No Valid trajectories out of 109!
attempting running ...
turnning 1.57 for spin recovery
spin running
...