rviz里面map not received
-
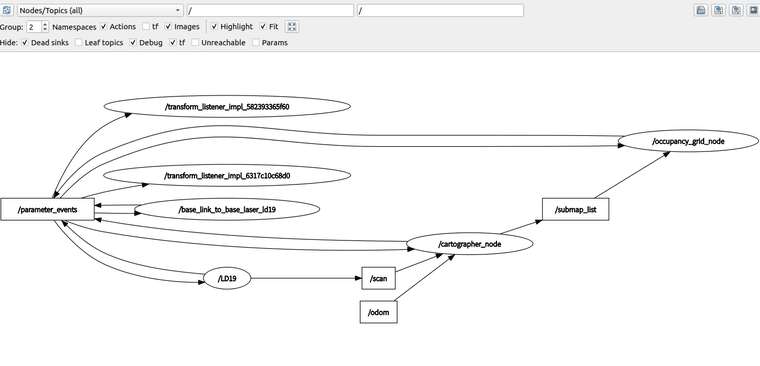
如图,光一个雷达,想试一试静态建图,没用里程计,carto_ros包安装完成,pkg list也能收得到,tf变换已经在文件里面写了,rqt里面也有map_submit,但是不知道为什么rviz里面就是显示map not recieved,文档参考的小鱼教程里面,求助
-
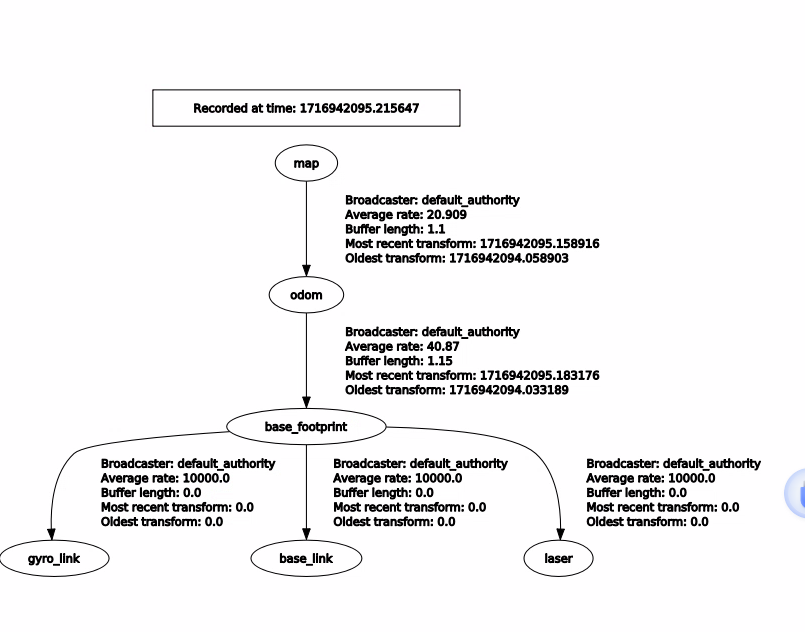
@2218681402 八成是没静态坐标变换,把laser 的tf坐标挂在base-link 或base-footprint上,可以看看tf树
-
此回复已被删除! -
@1648801874
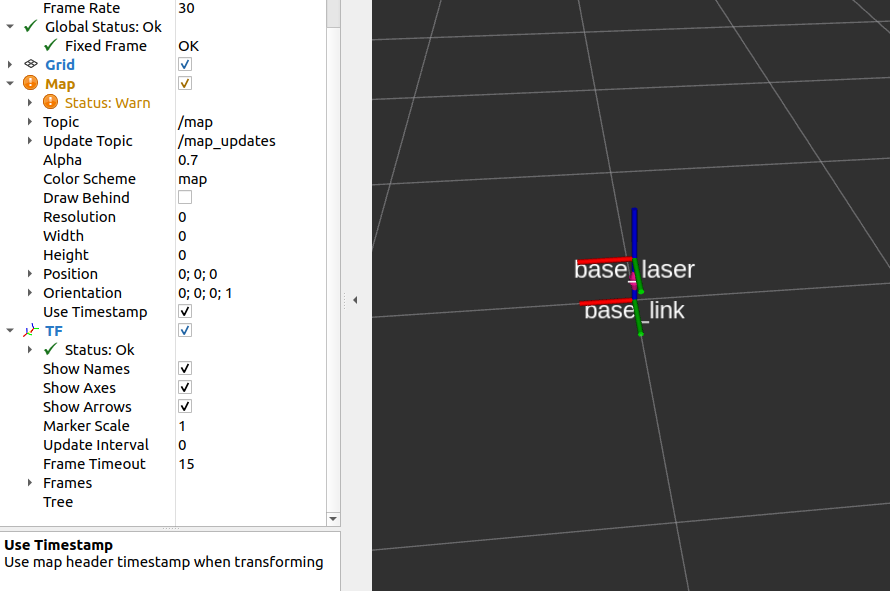
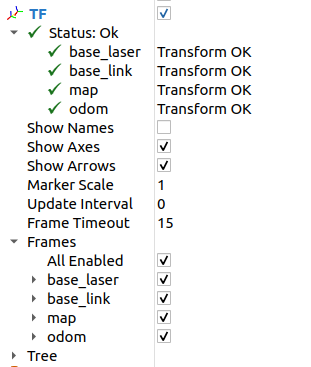 目前是这样,已经四个坐标都加了转换,但map还是收不到
目前是这样,已经四个坐标都加了转换,但map还是收不到