fishbot_camera配置和启动问题
-
对于你遇到的问题,我会分别给出解答。
问题1:关于
camera_driver无法启动且无响应-
确保环境变量正确:首先确认你已经正确设置了ROS 2的环境变量。通过运行
source ~/fishbot_ws/install/setup.bash,你应该已经做了这一步。 -
检查依赖项:确保
fishbot_camera包的所有依赖项都已正确安装。你可以查看package.xml文件或CMakeLists.txt文件来确认依赖项,并使用rosdep工具来安装它们。 -
查看日志:运行
camera_driver时,你应该查看ROS 2的日志输出,看看是否有任何错误或警告信息。你可以使用ros2 launch或ros2 run命令时加上--screen选项来直接在终端显示输出。 -
检查节点列表:使用
ros2 node list命令来查看当前运行的ROS 2节点列表,确认camera_driver节点是否确实已经启动。 -
权限问题:如果摄像头需要特定的权限才能访问,确保你有足够的权限来启动摄像头。
-
调试:如果可能,尝试在
camera_driver的源代码中加入调试信息,比如打印日志,来查看程序执行到了哪一步。
问题2:关于调整camera的flash模式和启动模式
-
查看文档:首先,查看
fishbot_camera包的文档或源代码,看是否有关于调整flash模式和启动模式的说明。 -
参数服务器:ROS 2使用参数服务器来管理节点的参数。你可以使用
ros2 param命令来查看和设置节点的参数。例如,ros2 param list <node_name>列出节点的所有参数,ros2 param set <node_name> <parameter_name> <value>设置参数的值。 -
服务调用:如果
camera_driver提供了服务来动态调整flash模式或启动模式,你可以使用ros2 service命令来调用这些服务。 -
配置文件:有时,摄像头驱动会使用配置文件来设置各种参数。检查
fishbot_camera包是否包含这样的配置文件,并尝试修改它以调整flash模式和启动模式。 -
硬件限制:需要注意的是,某些摄像头的flash模式和启动模式可能受到硬件本身的限制,可能无法通过软件完全控制。
如果以上方法都不能解决问题,建议你在ROS 2的社区论坛或GitHub仓库上寻求帮助,并附上详细的错误信息和代码片段,以便其他人更好地理解你的问题并提供帮助。
以上为生成回答,仅供参考~
-
-
@2431039560 拍张图看下你的板子,b板不需要切换模式,但是camera要支持多播,其原理是camera向局域网发送广播,电脑收到广播地址,然后请求地址获取图像。camera_driver没反应,大概率是没有收到任何数据包,可能还是网络这边出问题没发出来。
-
此回复已被删除! -
@小鱼 可能就是网络问题吧,我电脑和camera连的都是同一个手机热点,我看网上说手机热点好像算可以多播的,然后我的node list也显示不出启动的node。
如果是网络问题的话我需要找一个路由器来连接吗,我换了我室友的热点也不行 -
@2431039560 可以换个路由器试试
-
@小鱼 好的,我去其他寝室找找试试吧
-
@小鱼 好像换成路由器也还是不行,camera红色的灯一直在闪然后也ros2 run不起来,电脑和camera都连在同一个网络下是对的吗?

-
@小鱼 ```
yc@humble-virtual-machine:~/fishbot_ws$ source ~/fishbot_ws/install/setup.bash
yc@humble-virtual-machine:~/fishbot_ws$ ros2 launch fishbot_camera camera_driver
file 'camera_driver' was not found in the share directory of package 'fishbot_camera' which is at '/home/yc/fishbot_ws/install/fishbot_camera/share/fishbot_camera'
yc@humble-virtual-machine:~/fishbot_ws$小鱼,我找到原因了,用launch就可以看错误原因了,是没找到这个包 现在要怎么做呀,也source了 文件路径看着也是对的,电源的话我直接接在二驱的小车超声的这个接口上了,电源也是小车的 -
-
@小鱼

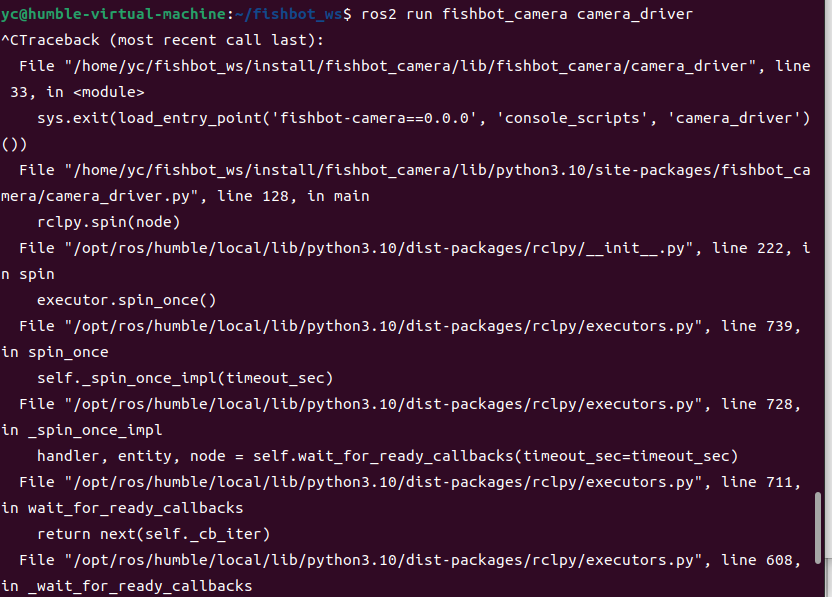
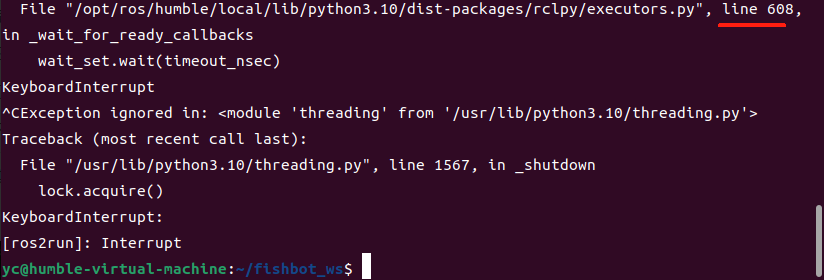
我只是试了一下机器人说的ros2 launch这个情况,ros2 run的话就是这样没有反应,然后我用CTRL C完是这样的 -
@2431039560 可以接上USB,然后打开串口,波特率115200,贴下日志看看
-
@小鱼
 好像什么都没有,上次启动还会接收到一些IP之类的信息(虽然也是ros2 run以后一片空白)
好像什么都没有,上次启动还会接收到一些IP之类的信息(虽然也是ros2 run以后一片空白)
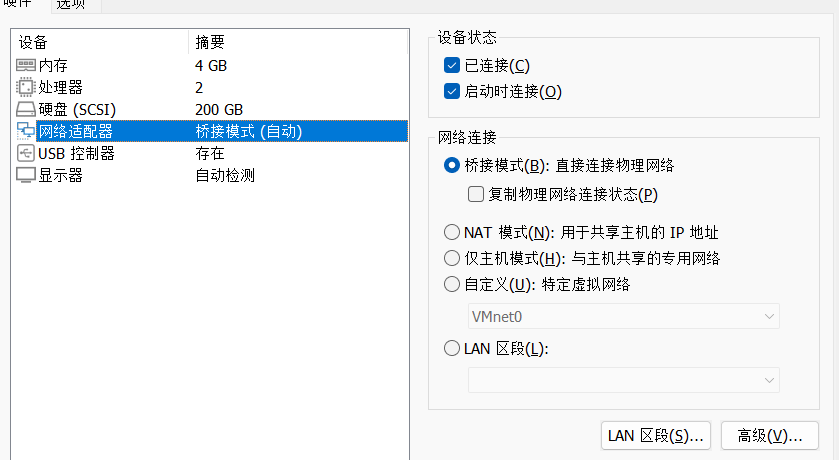
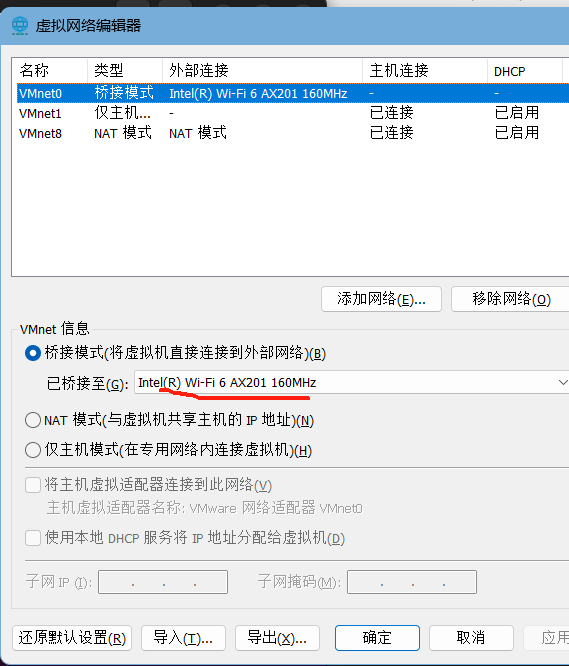
我的是虚拟机,也改成桥接模式了,用的是我手机热点,WiFi也试了,好像也还是网络问题
-
@2431039560 可以点下RST按钮,看看能不能看到一些日志信息。
-
@小鱼 点了rst好像也是一样的,会不会是要给gpio0口接个低电平呀,我看网上是这样的说的
-
-
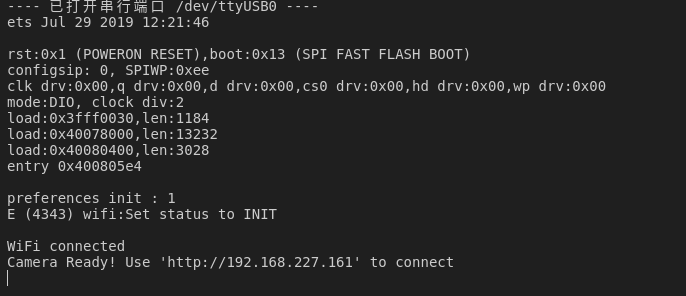
---- 已打开串行端口 /dev/ttyUSB0 ---- ets Jul 29 2019 12:21:46 rst:0x1 (POWERON_RESET),boot:0x13 (SPI_FAST_FLASH_BOOT) configsip: 0, SPIWP:0xee clk_drv:0x00,q_drv:0x00,d_drv:0x00,cs0_drv:0x00,hd_drv:0x00,wp_drv:0x00 mode:DIO, clock div:2 load:0x3fff0030,len:1184 load:0x40078000,len:13232 load:0x40080400,len:3028 entry 0x400805e4 preferences init : 1 E (4343) wifi:Set status to INIT WiFi connected Camera Ready! Use 'http://192.168.227.161' to connect哦哦,好的,全部的话就是这些
-
此回复已被删除! -
@2431039560
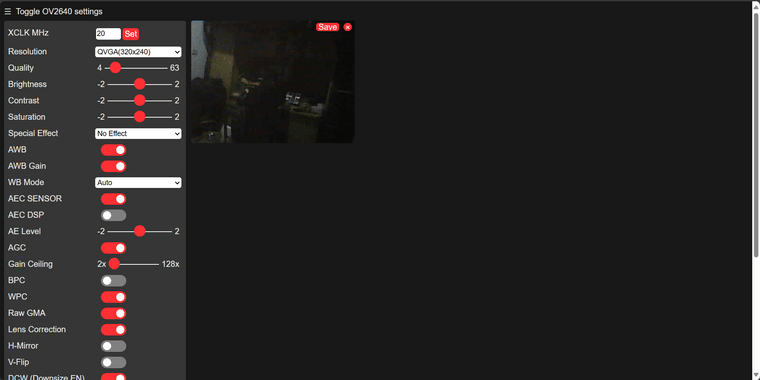
网页里可以看,但好像还是run不起来 -
-
@小鱼 嗯嗯,好!辛苦大佬啦