连接网络时报错找不到frame_id,不连接网络正常。
-
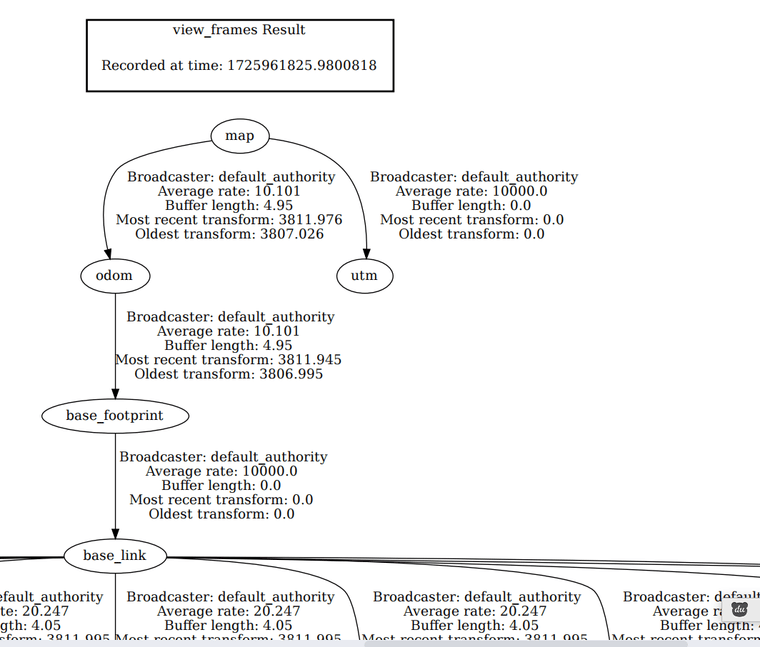
不连接网络,均正常。
此时,部分tf树为:
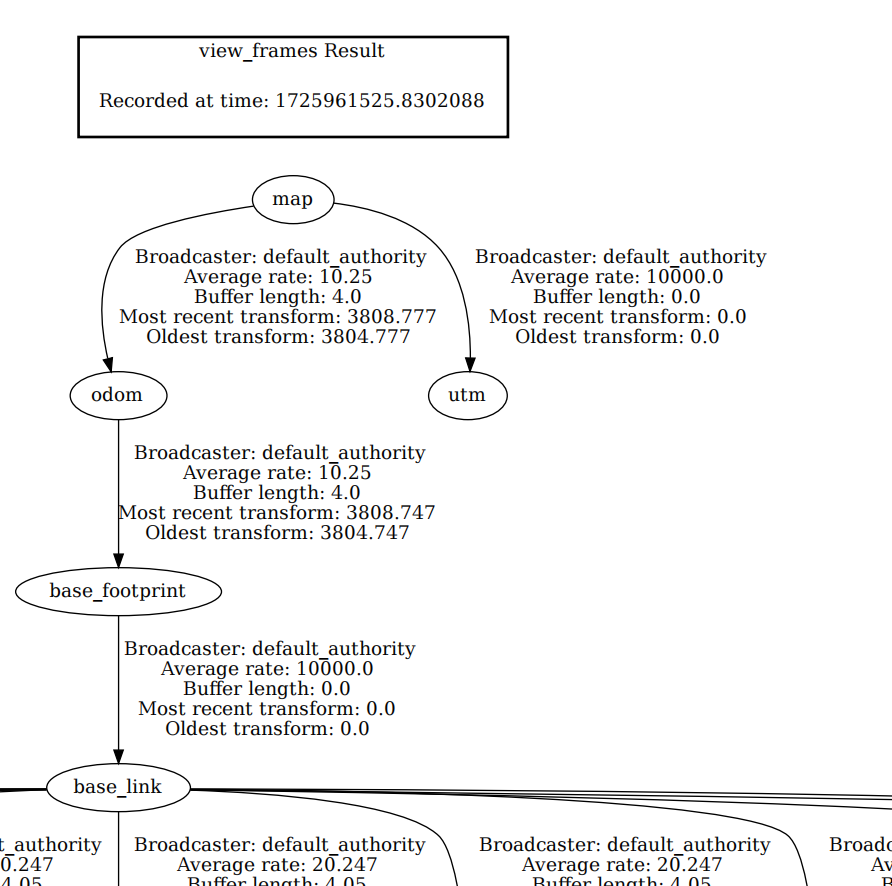
连接网络时报错内容为:
"map" passed to lookupTransform argument target_frame does not exist.Timed out waiting for transform from base_footprint to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
此时,部分tf树为:
请问这是什么原因导致的? -
您遇到的问题通常与机器人操作系统(ROS)中的坐标变换树(tf tree)相关,特别是在处理网络连接时。根据您提供的错误信息,有几个可能的原因和解决方案:
1. tf树不一致
问题描述:
- 错误提示
"map" passed to lookupTransform argument target_frame does not exist.表明当尝试从某个帧变换到"map"帧时,"map"帧在tf树中不存在。 - 另一个错误
Timed out waiting for transform from base_footprint to odom to become available表示在tf树中找不到从base_footprint到odom的变换。
可能原因:
- 节点(如地图服务器、里程计节点等)未正确运行或未正确配置,导致它们没有发布到tf树。
- 网络连接可能影响了节点之间的通信,导致某些节点无法正确注册到tf树中。
解决方案:
- 检查节点状态:确保所有相关的节点(如地图服务器、里程计计算节点等)都已正确启动并运行。
- 检查ROS_MASTER_URI:确保所有节点都连接到正确的ROS主节点。如果它们通过网络连接,请检查ROS_MASTER_URI环境变量是否正确设置。
- 使用
rostopic echo /tf:检查tf消息以确认哪些帧被发布,并查看是否存在缺失的帧。 - 检查网络连接:如果问题仅在网络连接时出现,请检查网络设置,包括防火墙规则、路由器设置等,确保ROS节点之间可以相互通信。
2. 节点启动顺序问题
问题描述:
- 有时候,如果某些依赖节点(如发布tf变换的节点)在尝试使用这些变换的节点之前没有完全启动或初始化,也可能会出现此类问题。
解决方案:
- 确保所有相关节点按照正确的顺序启动。
- 使用ROS的
launch文件来管理节点的启动顺序和依赖关系。
3. 硬件或软件配置问题
问题描述:
- 特定的硬件配置或软件设置可能影响到ROS节点的运行。
解决方案:
- 检查硬件资源(如CPU、内存、网络带宽)是否足够。
- 确保ROS和相关依赖库都已更新到最新版本。
4. 调试和日志
建议:
- 增加日志记录,以便在问题发生时捕获更多信息。
- 使用
rosnode info、rostopic info和rostopic echo等命令来获取有关节点和话题的更多信息。
通过以上步骤,您应该能够诊断并解决连接网络时出现的tf树问题。如果问题仍然存在,您可能需要更详细地检查每个节点的具体实现和配置。
以上为生成回答,仅供参考~
- 错误提示
-