配置完成moveit_setup_assistan,编译后运行demo.launch.py无法加载机器人模型,ubuntu22.04,ros2-humble
-
@kangkang-li 我是了一下也不可以求指导一下,一直解决不了,我的模型时sw导出来的我看好多人也是sw导出来用不了
-
打开官方样例:ros2 launch moveit2_tutorials demo.launch.py rviz_tutorial:=true的时候,提示ackage 'moveit2_tutorials' not found: "package 'moveit2_tutorials' not found, searching: ['/opt/ros/humble']"咋回事,鱼哥
-
您好,一样的问题,请问解决了吗,我也是用SW转的urdf不对,用鱼哥的就没事,请问后边如何解决的,求!!!!!
-
@768672278 我是使用sw2rudf将sw2022版本中的sw文件转换为urdf文件的,之后使用moveit_setup_assistant将配置的此urdf文件,在moveit_setup_assistant中能够加载我的模型,但是配置完成之后打开运行demo.launch之后就无法加载我的模型了。请问是配置问题还是我的URDF文件问题,如果是URDF文件问题应该如何正确由SW文件生成URDF文件,
-
@768672278 我也是这样不知道兄弟你解决了没有
-
@768672278 大概率是URDF文件问题,直接导出后的文件需要修改下才能用,可以对比下教程中的URDF
-
 小 小鱼 将这个主题标记为已解决,在
小 小鱼 将这个主题标记为已解决,在
-
@kangkang-li
大佬,解决了,请受遥远的小弟一拜!
-
@kangkang-li 太感谢了!!!!
-
如果修改完前面大佬提到的urdf文件中的velocity数字还加载不出来的话,接着去修改功能包config目录下的joint_limits.yaml中的max_velocity数值。
出现问题是因为报错了what(): parameter 'robot_description_planning.joint_limits.joint1.max_velocity' has invalid type: expected [double] got [integer] -
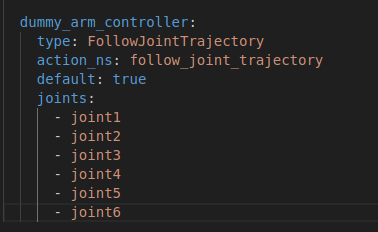
@为什么要弹春日影啊 如果成功导入了机器人模型,plan&execute后出现Failed失败情况,在moveit_controller.yaml添加内容:
action_ns: follow_joint_trajectory
default: true
-
@kangkang-li ;解决了,谢谢大佬