-
执行ros2 launch fishbot_description gazebo.launch.py 之后
Rviz2出现Message Filter dropping message: frame 'laser_link' at time 4320.584 for reason 'the timestamp on the message is earlier than all the data in the transform cache'
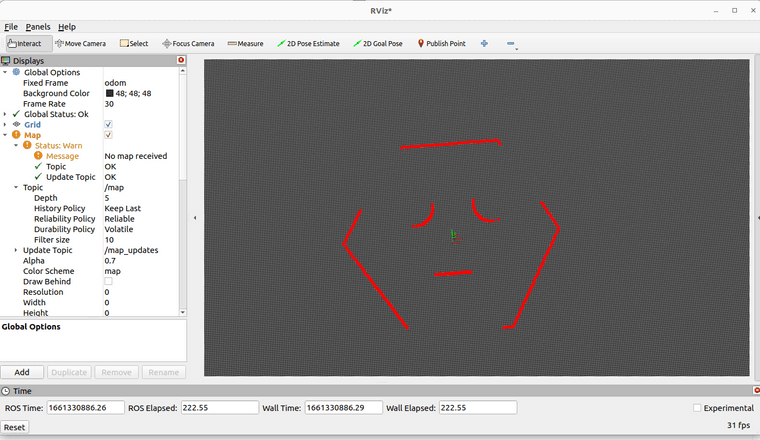
疑惑一:Global Options的Fixed Frame必须是odom才可以 换成map 下面tf就会一直闪报错 不理解
疑惑二:Map 出现警告 Message出现No map received 另外Topic是否应该是 /map 还是其他的 不理解执行ros2 launch fishbot_navigation2 navigation2.launch.py 之后
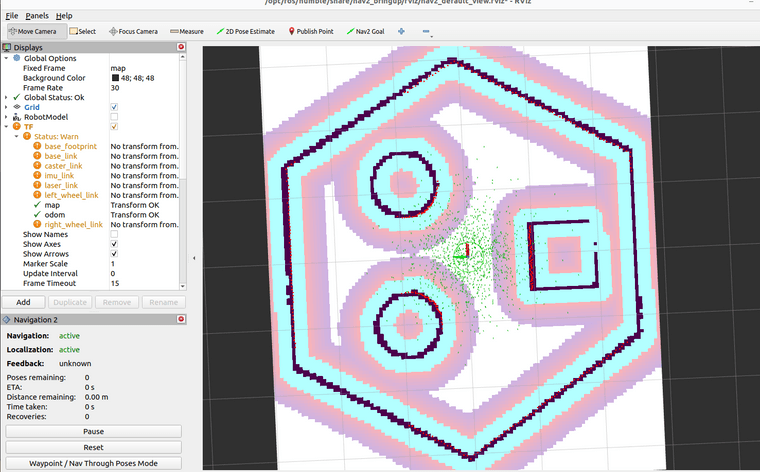
疑惑一:TF树 除了Map odom之外其他的一直出现闪动
疑惑二:LaserScan 也是一直警告 Status一会OK一会Error 甚至rviz2会崩溃闪退
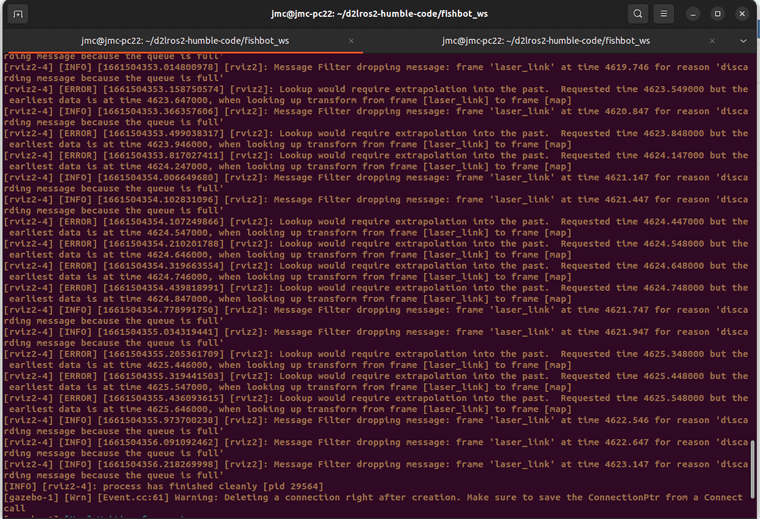
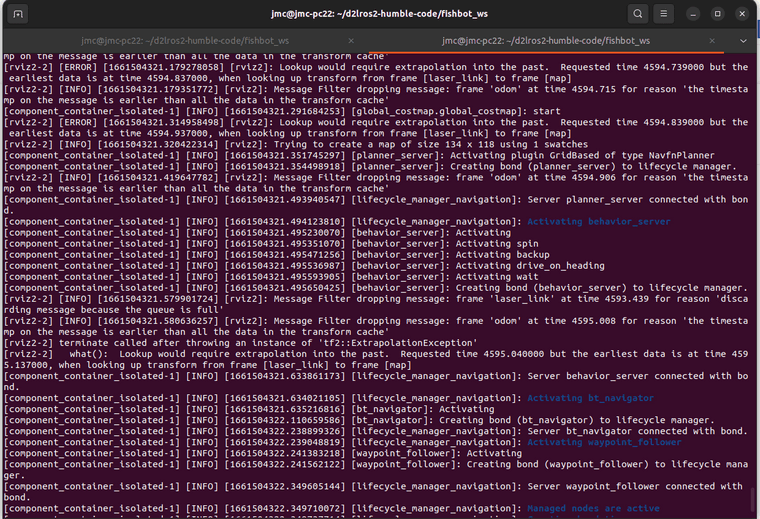
疑惑三:Global Planner 中的 Downsampled Costmap 出现警告 No map received另外终端有个错误一直在刷 Lookup would require extrapolation into the past. Requested time 5418.450000 but the earliest data is at time 5418.549000, when looking up transform from frame [laser_link] to frame [map]
Message Filter dropping message: frame 'odom' at time 5420.280 for reason 'the timestamp on the message is earlier than all the data in the transform cache'
不理解 -
@1216135454 可能都是TF问题,仿真情况下use_sim_time参数记得都要设置成true
-
@小鱼 好的谢谢
-
@小鱼 执行ros2 launch fishbot_description gazebo.launch.py use_sim_time:=True
然后再执行
ros2 launch fishbot_navigation2 navigation2.launch.py use_sim_time:=True
可TF树还是会一直闪
Rviz2然后就出现闪退了
-
@小鱼 Requested time 4448.920000 but the earliest data is at time 4448.934000
这种一般错误通过什么方式解决啊 大佬 -
 小 小鱼 从 中的 动手学ROS2 移动了该主题
小 小鱼 从 中的 动手学ROS2 移动了该主题
-
@小鱼 我是实体机器人上面,use_sim_time设置的false,但是也会出现上面提到的错误,怎么解决呢?
-
@1932088526 具体问题具体分析哈
-
请问你这个问题解决了吗,我也遇到了这个问题
-
@1442058245 请问你的问题解决了吗?我今天也是时间戳的问题,我已经修改为true了还是不行,提示消息队列满了或者时间戳较早,把雷达的消息全部删除了