@小鱼 transform_tolerance:0.5 是该这个吗
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
1216135454 发布的最新帖子
-
RE: 导航教程中,给定机器fishbot参考点后,终端报错[ERROR] [component_container_isolated-1]: process has died发布在 Nav2
-
RE: 使用fishbot_ws进行Nav2单点导航失败(全程跟教程来的)发布在 ROS2
@小鱼 Requested time 4448.920000 but the earliest data is at time 4448.934000
这种一般错误通过什么方式解决啊 大佬 -
RE: 使用fishbot_ws进行Nav2单点导航失败(全程跟教程来的)发布在 ROS2
@小鱼 执行ros2 launch fishbot_description gazebo.launch.py use_sim_time:=True
然后再执行
ros2 launch fishbot_navigation2 navigation2.launch.py use_sim_time:=True
可TF树还是会一直闪
Rviz2然后就出现闪退了
-
使用fishbot_ws进行Nav2单点导航失败(全程跟教程来的)发布在 ROS2
执行ros2 launch fishbot_description gazebo.launch.py 之后
Rviz2出现Message Filter dropping message: frame 'laser_link' at time 4320.584 for reason 'the timestamp on the message is earlier than all the data in the transform cache'
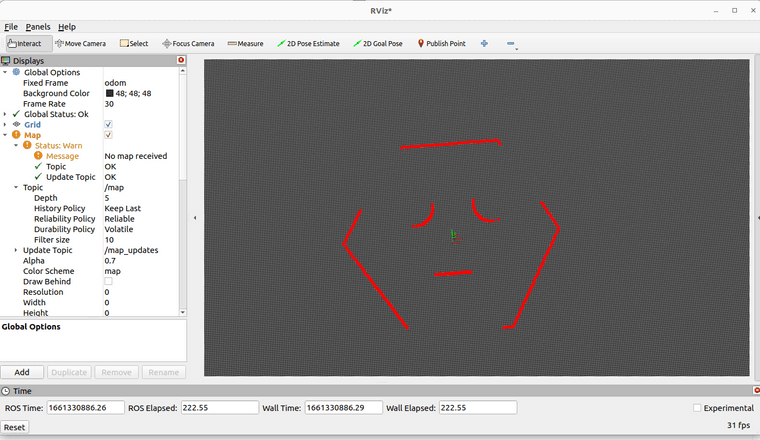
疑惑一:Global Options的Fixed Frame必须是odom才可以 换成map 下面tf就会一直闪报错 不理解
疑惑二:Map 出现警告 Message出现No map received 另外Topic是否应该是 /map 还是其他的 不理解执行ros2 launch fishbot_navigation2 navigation2.launch.py 之后
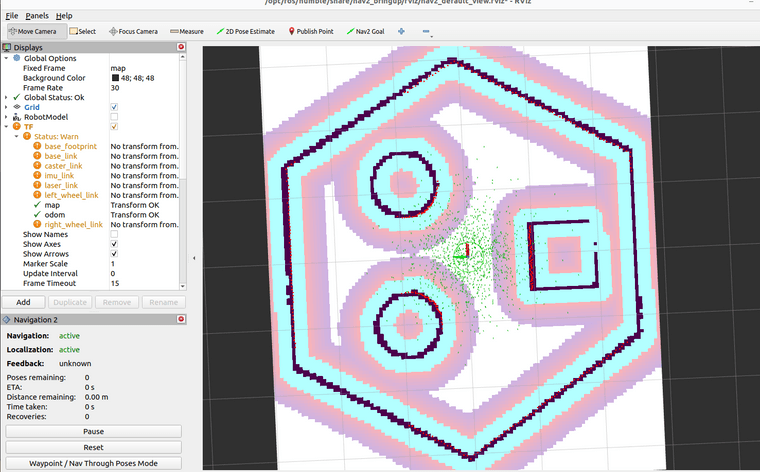
疑惑一:TF树 除了Map odom之外其他的一直出现闪动
疑惑二:LaserScan 也是一直警告 Status一会OK一会Error 甚至rviz2会崩溃闪退
疑惑三:Global Planner 中的 Downsampled Costmap 出现警告 No map received另外终端有个错误一直在刷 Lookup would require extrapolation into the past. Requested time 5418.450000 but the earliest data is at time 5418.549000, when looking up transform from frame [laser_link] to frame [map]
Message Filter dropping message: frame 'odom' at time 5420.280 for reason 'the timestamp on the message is earlier than all the data in the transform cache'
不理解