请教一下各位,请问/gazebo/model_state发布的信息是机械臂末端执行器的位置和速度么
-
请教一下各位,请问/gazebo/model_state发布的信息是机械臂末端执行器的位置和速度么
-
@霜丶川 把信息展示一下瞅瞅哈
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
问题一定要描述清楚,终端打印一定复制粘贴(你可以在linux系统上打开浏览器进社区)
基本的Markdown语法一定要学习下,有的小伙伴图片代码一团糟
提问时一定要提供尽可能多的信息,包括你的目的,比如你其实想装装某个库遇到问题,不要只说这个问题,因为可能有更好的替代方案
先搜索再提问,很多问题其实都有解决方案,确保你自己对自己的问题有一定了解再提问
尽量一句话说完,不要把社区当微信聊天一样用,每一个回复都尽量提供更多的的信息。 -
@小鱼 感谢小鱼大佬和各位站友哈,我用的事UR5固定基座机械臂。rostopic echo /gazebo/model_state,发布的信息如图所示
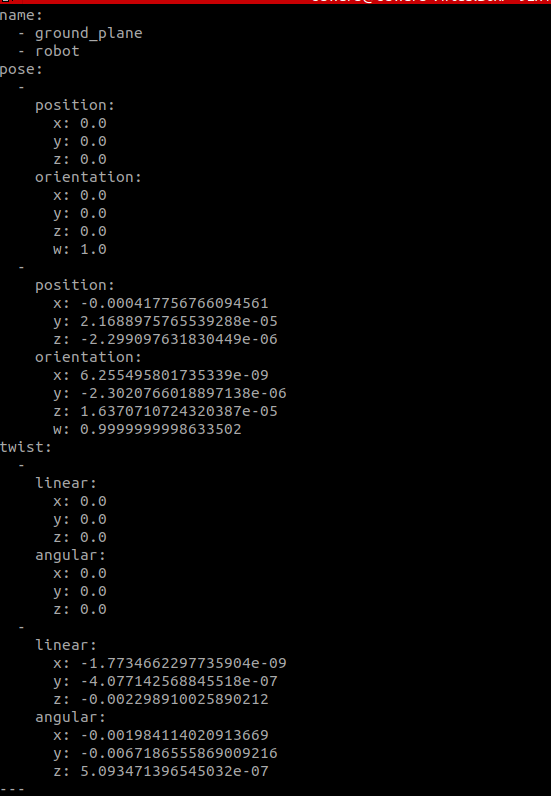
请问输出的position 和 twist 的信息是机械臂的末端执行器的位置、位姿、角速度和线速度么?谢谢大伙