使用小鱼的串口代码间歇性串口打开失败
-
@小鱼 小鱼请问,我想实现类似stm32串口那样子的中断接收,有什么办法吗?或者我想在ros给下位机发送了指令后,获取下位机的反馈,但是你的代码里面的接收是异步接收的,所有没办法在下发指令之后去循环查询标志位获取返回信息,类似如下
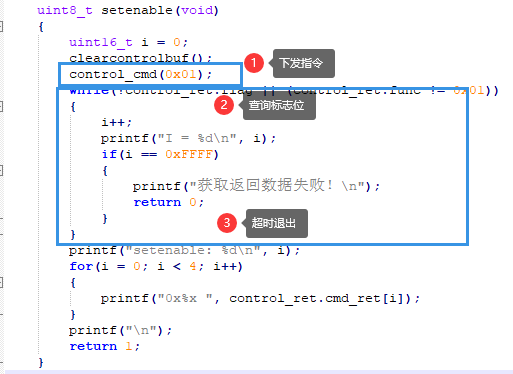
因为是异步接收(本以为会跟stm32的串口中断一样),所有返回信息会在循环等待超时之后才会更新,也就是说每次都会超时,然后才更新数据。
请问有什么解决办法吗?谢谢小鱼 -
@sen 串口通信是全双功的,所以一定是收发不是同步的,不过你可以在数据接收那里进行数据标志的检测,然后他通过一个原子变量进行标志,应该可以达到同样的效果。
-
@小鱼 之前我测试的时候就是在串口接收函数的回调里面对数据进行分类处理,然后每一类数据都有一个flag,我在发送指令后while检测了一段时间应该有变化的那个flag,但是每次在while里面都检测不到flag就很奇怪,示例代码如下:
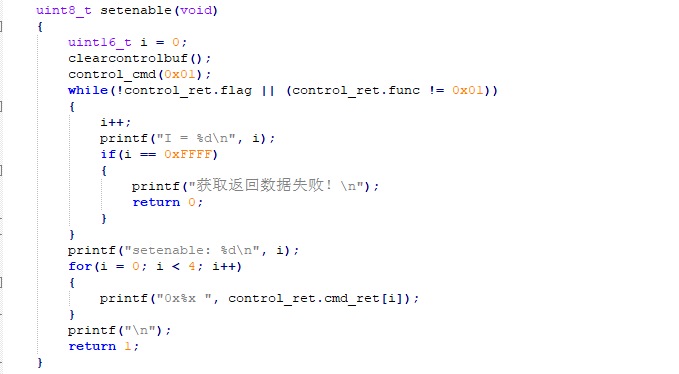
不知道哪里出问题了 -
@sen 这个你把返回的所有数据打印出来瞅瞅就可以给问题定位了,是没收到还是没发过来,都加个时间戳看看
-
@小鱼 小鱼,今天又出现了打开后出错的情况,如下:
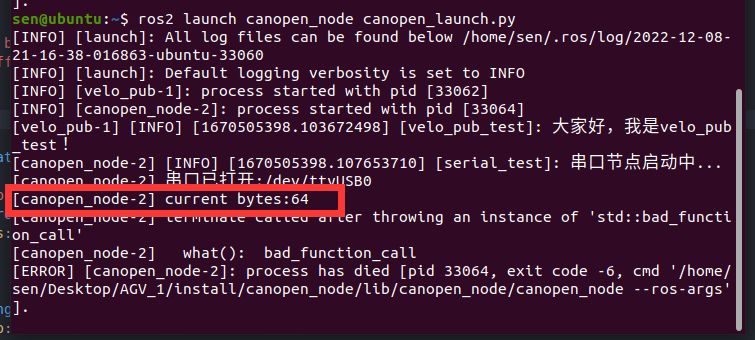
最开始怀疑是数据量太大,做了几次测试之后,发现如果在启动串口时,缓存区已有大量数据,则会导致出错。如果启动时,缓存区数据较少,则可以正常使用,请问小鱼有解决办法吗? -
此回复已被删除! -
@sen 感谢反馈,我又仔细去看了下代码,问题是出在了,打开串口和设置回调函数的顺序问题,先打开了串口后设置了回调函数,如果此时有数据就没有办法进入回调.目前猜测最有可能是这里造成的问题,你可以将设置回调函数放在对串口对象的构造中,然后在构造函数里就完成对回调函数的设置,这样应该就没有问题了.
祝好!
-
@小鱼 小鱼你好,你的代码里面定义回调函数使用的是lambda函数体,我不太了解应该怎么将其放在串口对象的构造函数中,之前试过使用普通函数定义回调,但是编译有问题,请问能帮忙修改一下吗?谢谢小鱼了。
-
@sen 最近抽个空我更新一下,更新后再回复
-
@小鱼 好的,麻烦小鱼了!谢谢!
-
@sen 问题应该已经修复了,加了一个判断,回调函数不为空时再进行调用。
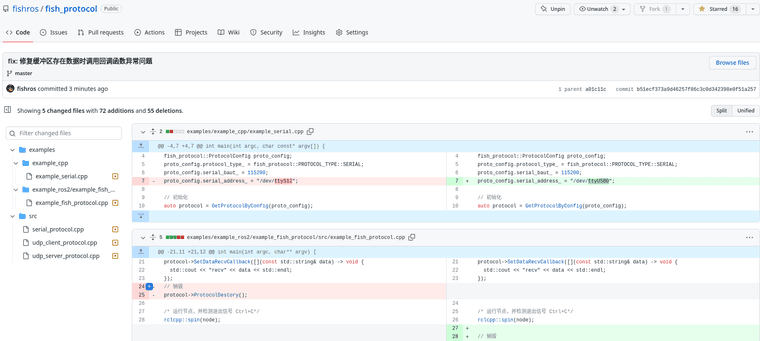
你下载最新的代码试试看~,或者直接在自己的程序上加上这个判断
if (bytes_transferred > 0) { std::string data_str(recv_data_buffer_, bytes_transferred); if (recv_data_callback_) { // 回调数据 recv_data_callback_(data_str); } -
 小 小鱼 在 中 引用了 这个主题
小 小鱼 在 中 引用了 这个主题
-
@小鱼 好的,我找时间试试,谢谢小鱼!
-
@小鱼 刚才测试了一下,暂时未出现过之前的问题了。不过我又有了新问题了
 ,请问小鱼,使用异步读取的时候 进入一次回调函数最多的数据量为32bytes(我这边测试最多出现过32bytes),请问有什么办法能提高这个“进入一次回调函数的最大数据量”吗?谢谢小鱼了
,请问小鱼,使用异步读取的时候 进入一次回调函数最多的数据量为32bytes(我这边测试最多出现过32bytes),请问有什么办法能提高这个“进入一次回调函数的最大数据量”吗?谢谢小鱼了 -
@sen 可以尝试增加单次处理回调的处理时间,也就是在回调函数里休眠,或者要改一下程序,把多次接收的数据进行保存,满足条件后调用回调
-
@小鱼 好的,谢谢小鱼!