simulink和gazebo仿真,gazebo模型乱飞
-
1、在rviz和gazebo都试过可以正常打开运行,并且各个关节不会散架
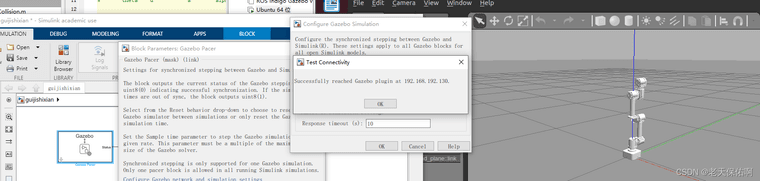
2、simulink和gazebo通过gazebo pacer实现成功通信
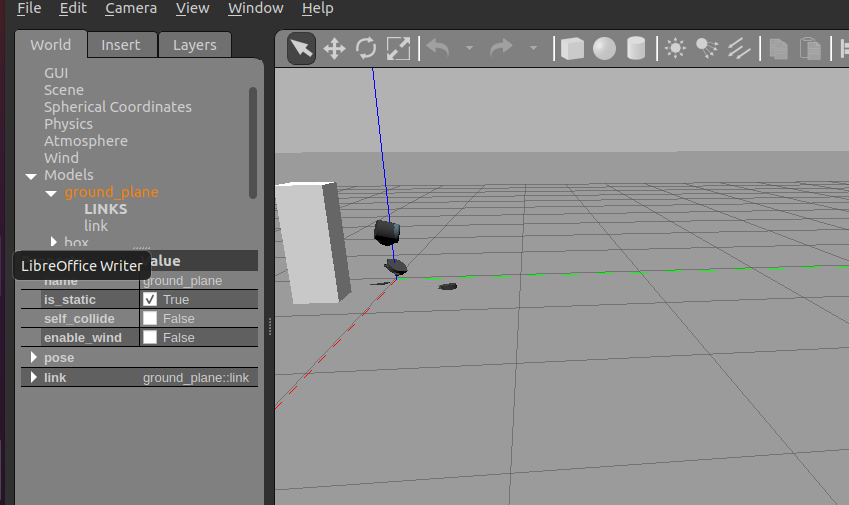
3、但是一点击simulink的运行,gazebo里面的模型就乱飞和坍塌
-
@767015514 应该是超速导致关节碰撞了
-
@小鱼 感谢!!!
我修改了一下urdf里面的velocity,原来是3.15,我改成了0.01,simulink点击run之后gazebo模型确实不散架了,但是gazebo模型不动了。
<limit
lower="-3.14"
upper="3.14"
effort="28"
velocity="0.01" />
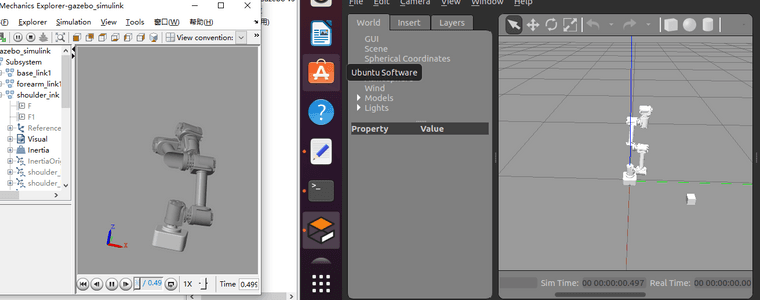
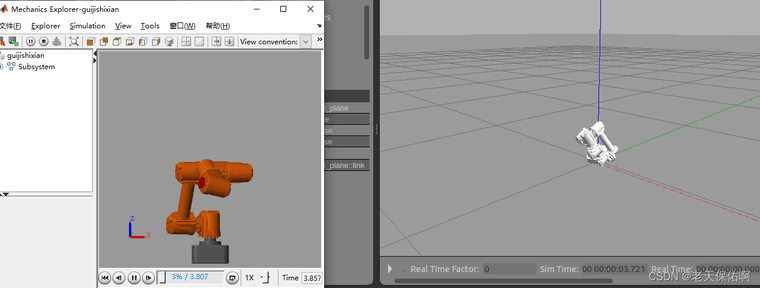
左边是simulink的模型在0.499运动的位置,右边是gazebo运动的位置(一直没动) -
@小鱼 您好,我修改了urdf文件里面关节的速度参数
<limit
lower="-3.14"
upper="3.14"
effort="28"
velocity="0.01" />
有个问题就是,simulink里面的模型的关节速度是时时刻刻都在发生变换,如果我只在urdf设置速度为蘑菇参数,那么运行simulink之后gazebo里面的模型就快速复原(回到原始位置)并且不会在运动。请问这是什么问题?或是速度哪里该怎么把数据实时传输给关节呢?
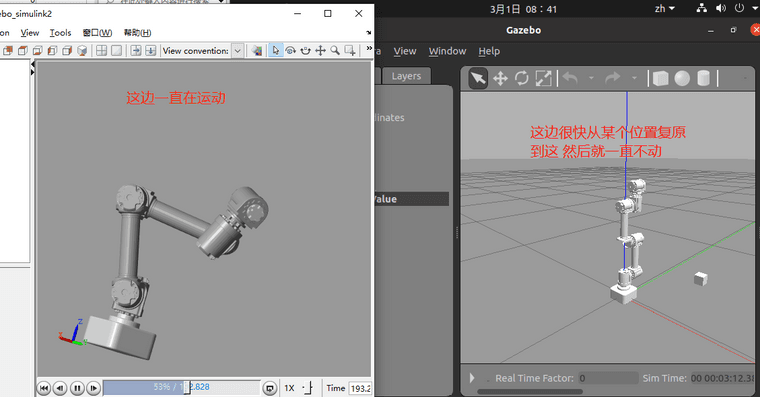
谢谢! -
7 767015514 将这个主题标记为已解决,在