simulink和gazebo仿真,gazebo模型回到原位不动
-
1、参考matlab官网的示例:https://www.mathworks.com/help/robotics/ug/control-manipulator-robot-with-co-simulation.html
2、终端输入:roslaunch xxxx_moveit_config gazebo.launch
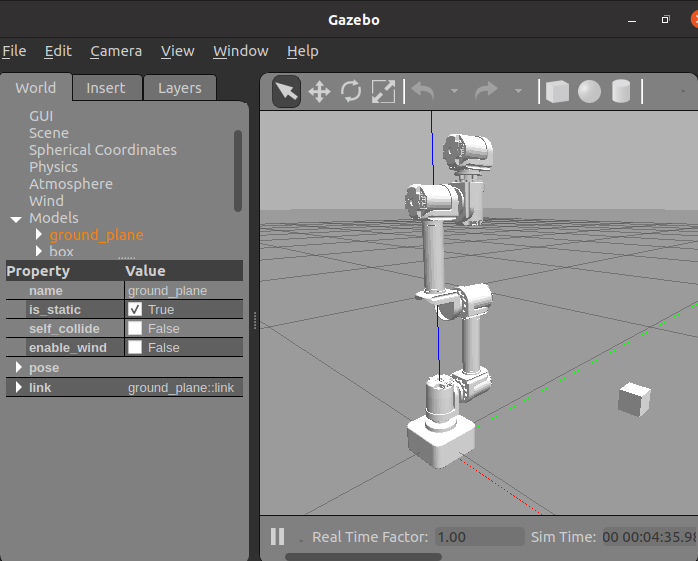
3、弹出的gazebo显示如下,得到最原始的位置
4、点击simulink的运行之后
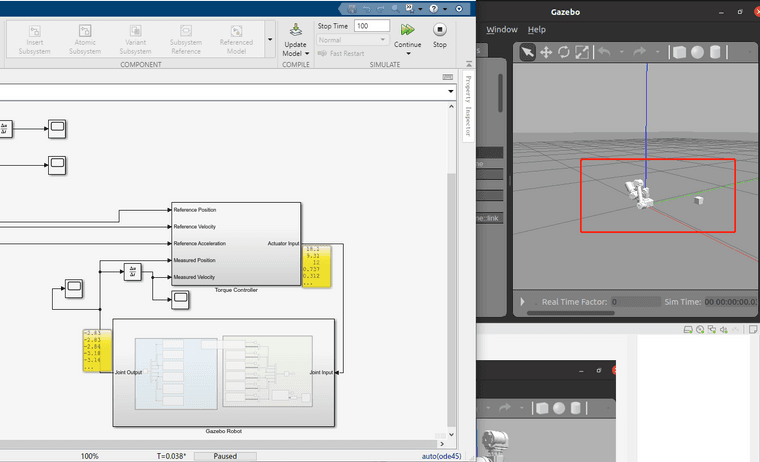
5、经过一系列机械臂的‘自我调整’,会慢慢往最原始的位置移动
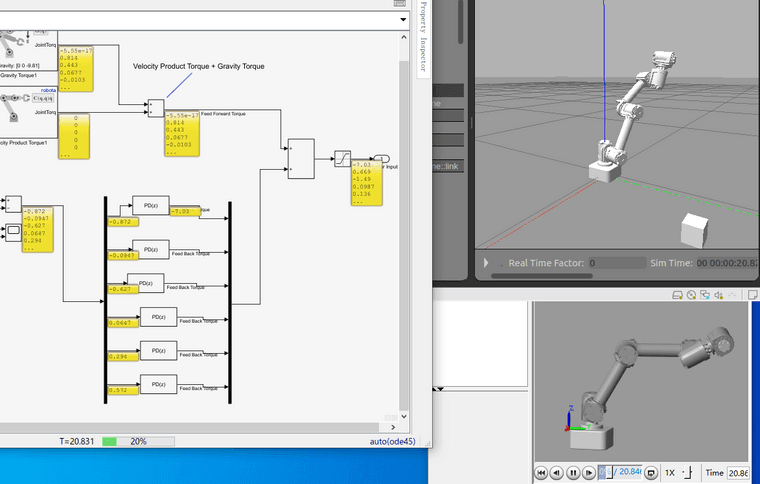
6、最终,移动到刚打开gazebo的界面位置,然后就一直在这个位置稍微抖动,但不会有大移动
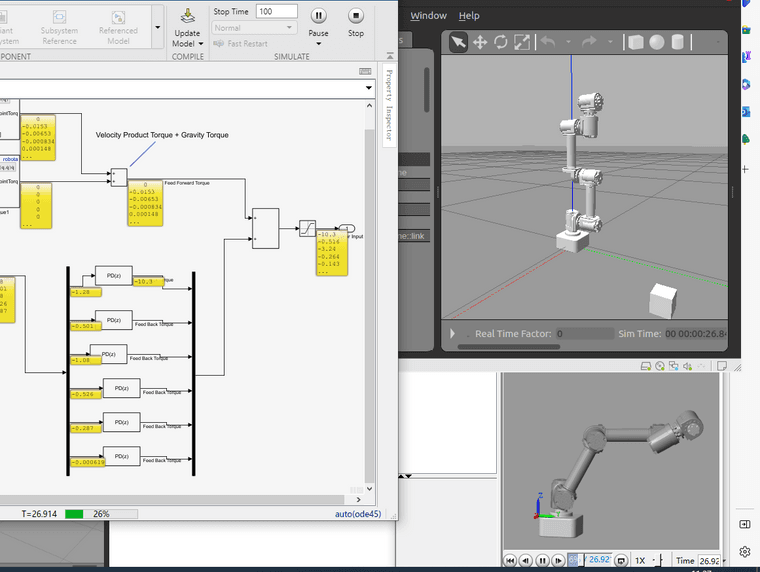
7、可以看到gazebo的运动轨迹和simulink的轨迹并没有任何的关系。而且,最后移动到最原始的位置就不会再发生大的运动也是我不知道为什么的点?
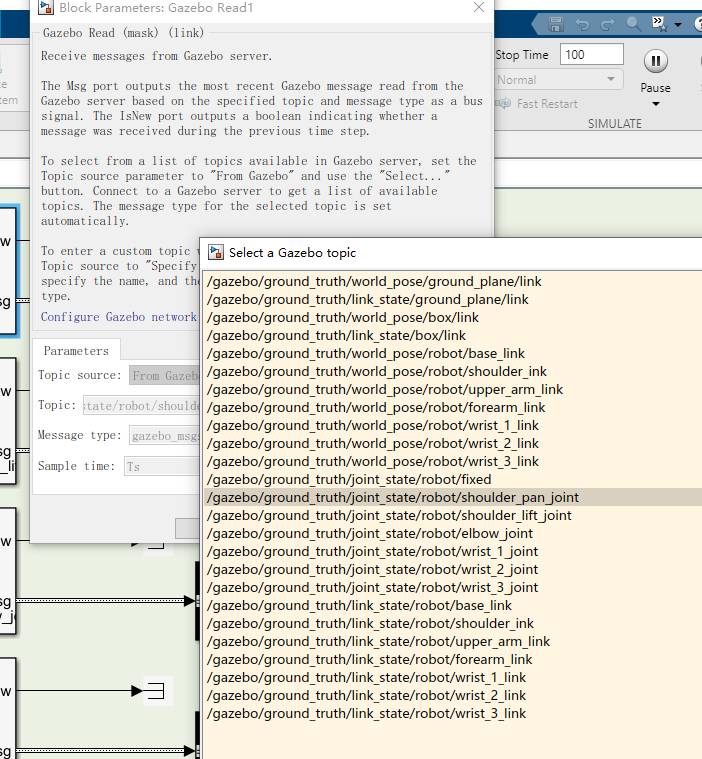
8、怀疑是不是Gazebo robot模块的输出问题,但是红色部分的选择项好像只能选择这个最合适。
-
@767015514 关节限位存在吗?自己订阅下你发布的话题,看看数据对比下
-
@小鱼 在urdf文件里面是这样的
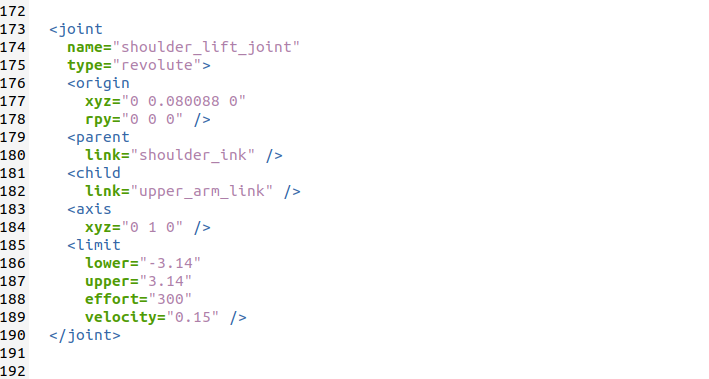
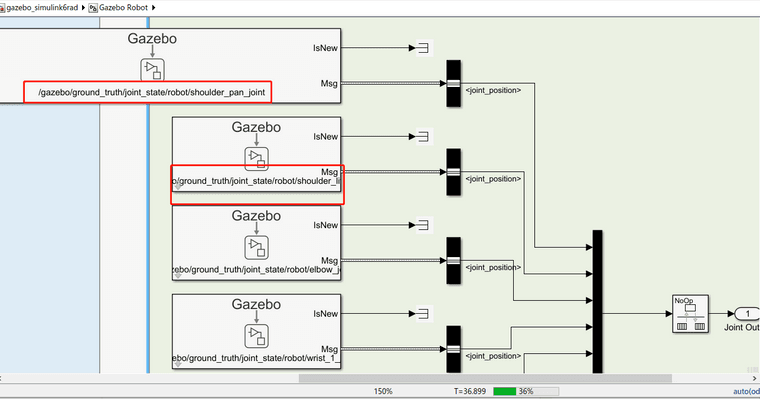
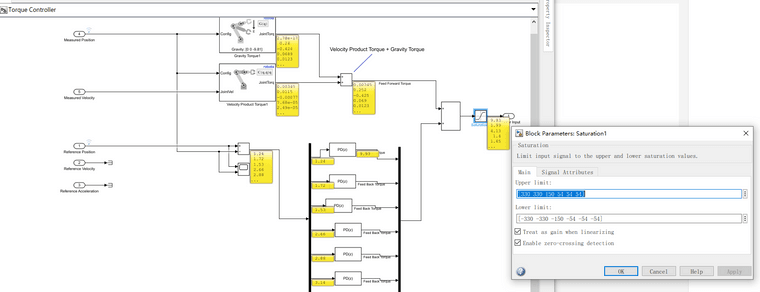
在simulink的模型里面
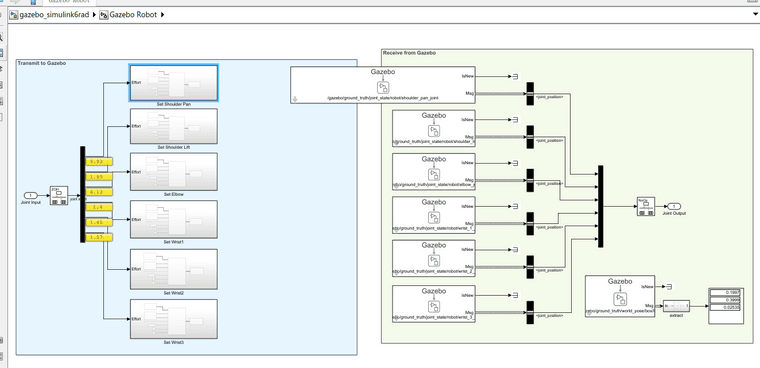
下面这个gazebo和simulink的反馈部分就和官网示例是一模一样的了。
-
7 767015514 将这个主题标记为已解决,在