如何在ROS2 humble版本运行micro-ros-agent与micro-ros的esp32串口通信
-
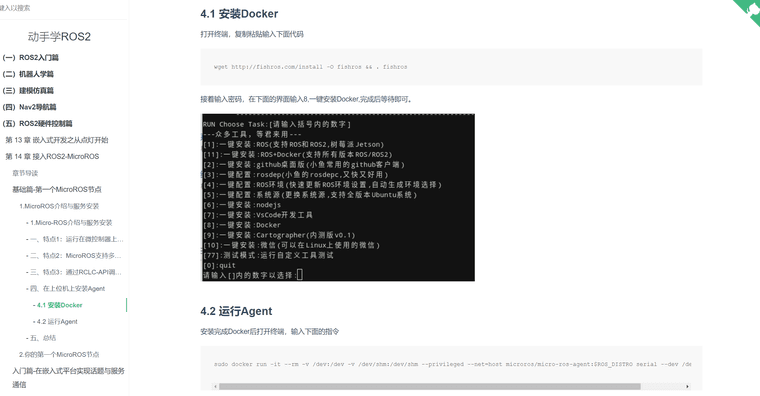
里面的教程是通过doctor容器来运行micro-ros-agent与micro-ros的esp32串口通信
我想想问问能否在ROS2 humble版本运行micro-ros-agent与micro-ros的esp32串口通信呢,我自己查阅教程安装了sudo snap install micro-ros-agent,但是不知道为啥按照教程通过容器的方式就能运行,但是自己运行sudo micro-ros-agent serial --dev /dev/ttyUSB0
不是串口打开失败就是打开设备失误
-
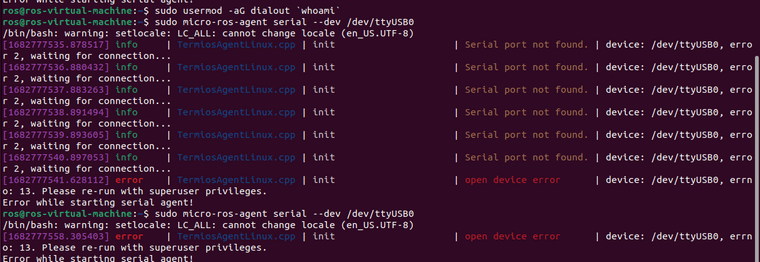
@ljy1852783649 给权限
@小鱼 在 串口USB永久权限设置 中说:
单次生效,立即生效
sudo chmod 666 /dev/ttyUSB0给当前用户添加永久权限,重启生效
sudo usermod -aG dialoutwhoami -
@小鱼
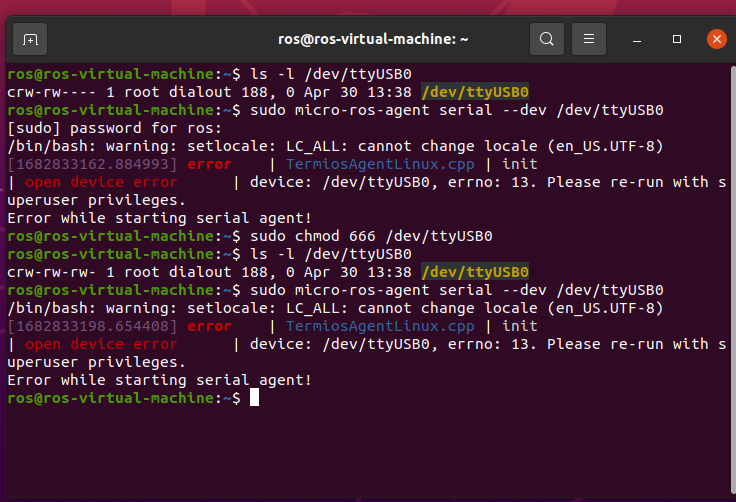
你好我这边单次生效,再运行sudo micro-ros-agent serial --dev /dev/ttyUSB0
还是无效,给当前用户添加永久权限,也没效果 -
@小鱼 在 如何在ROS2 humble版本运行micro-ros-agent与micro-ros的esp32串口通信 中说:
sudo chmod 666 /dev/ttyUSB0
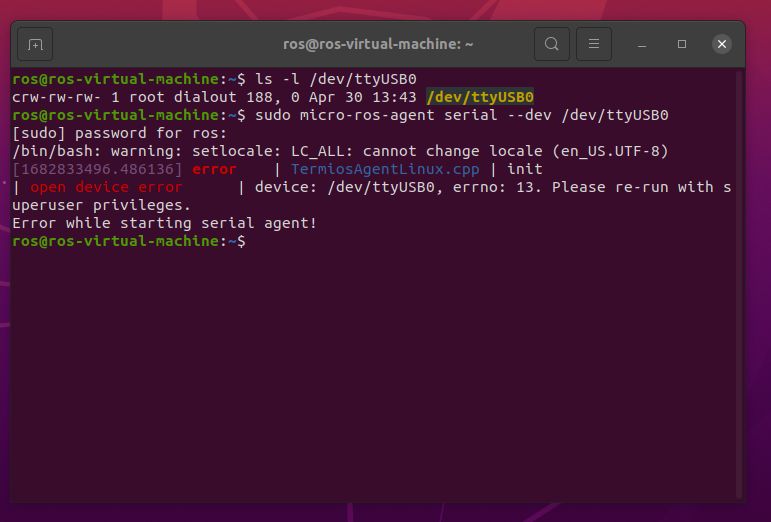
重启后执行sudo micro-ros-agent serial --dev /dev/ttyUSB0
还是无效 -
而且再ubuntu烧代码跟串口监视能用,不知道为啥不能sudo micro-ros-agent serial --dev /dev/ttyUSB0
-
@ljy1852783649 在 如何在ROS2 humble版本运行micro-ros-agent与micro-ros的esp32串口通信 中说:
micro-ros-agent
这个命令怎么来的,你自己编译的还是?用教程中的指令呢?
-
@小鱼 已解决
通过snap安装micro agent的办法如下:
sudo snap install micro-ros-agent
sudo snap install core
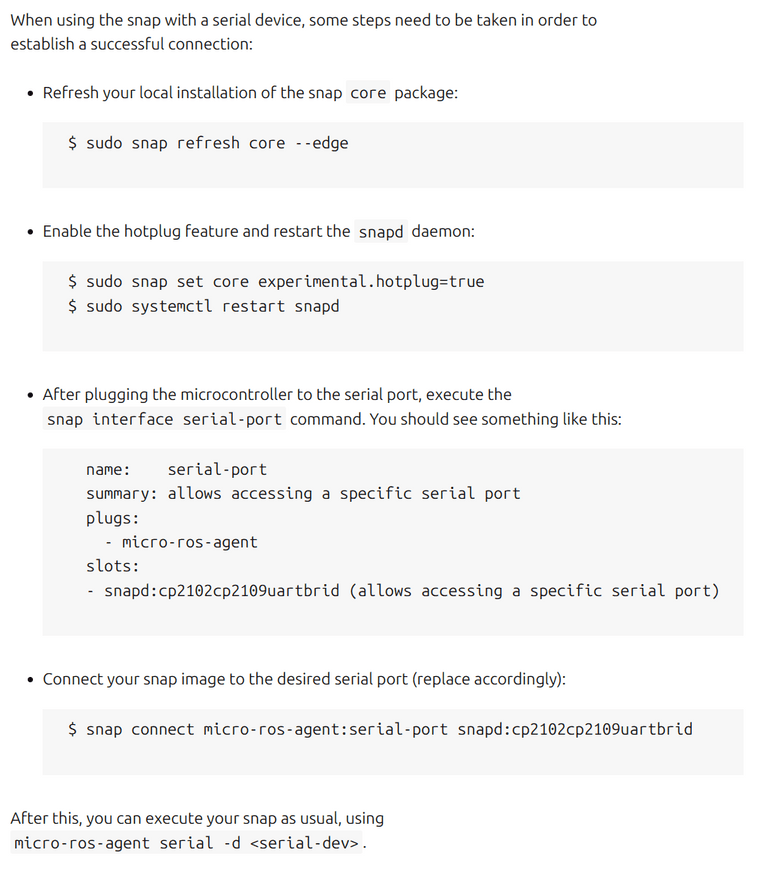
参考链接如下:
https://snapcraft.io/micro-ros-agent -
@ljy1852783649 按这个来,snap其实和docker差不多,也需要映射设备
@小鱼 在 agent 手动编译,不用docker,以及树莓派上使用micros-agent的方法 中说:
用的树莓派4B,先安装了,ubuntu22.04 server 64bit
一键安装ROS-HUMBLE
下载microros-agent
sudo apt-get install -y build-essential
mkdir -p microros_ws/src
cd microros_ws/src
git clone http://github.fishros.org/https://github.com/micro-ROS/micro-ROS-Agent.git -b humble
git clone http://github.fishros.org/https://github.com/micro-ROS/micro_ros_msgs.git -b humble编译
cd microros_ws
colcon buildRUN
树莓派上运行这句指令,然后双击开发板上的boot按键切换到serial模式进行传输即可
ros2 run micro_ros_agent micro_ros_agent serial -b 921600 --dev /dev/ttyUSB0 -vsudo apt install ros-humble-teleop-twist-keyboard