nav2 teb
-
小鱼儿你好,各位大佬好,我使用的的ubuntu20 Galactic
之前我使用的是 apt 安装的 nav2 ,并将 DWA替换成 TEB,并能正常导航,但是今天 我使用 源码编译安装 nav2后,使用 TEB 无法正常导航,报错如下:[controller_server-8] [INFO] [1684587635.038695680] [controller_server]: Created controller : FollowPath of type teb_local_planner::TebLocalPlannerROS [controller_server-8] [INFO] [1684587635.300053773] [controller_server]: Footprint model 'circular' (radius: 0.330000m) loaded for trajectory optimization. [controller_server-8] [INFO] [1684587635.305885395] [controller_server]: Parallel planning in distinctive topologies disabled. [controller_server-8] [ERROR] [1684587635.386737872] []: Caught exception in callback for transition 10 [controller_server-8] [ERROR] [1684587635.386827370] []: Original error: basic_string::_M_construct null not valid [controller_server-8] [WARN] [1684587635.387011823] []: Error occurred while doing error handling. [controller_server-8] [FATAL] [1684587635.387058905] [controller_server]: Lifecycle node controller_server does not have error state implemented [lifecycle_manager-13] [ERROR] [1684587635.391708394] [lifecycle_manager_navigation]: Failed to change state for node: controller_server [lifecycle_manager-13] [ERROR] [1684587635.391881931] [lifecycle_manager_navigation]: Failed to bring up all requested nodes. Aborting bringup.我将 DWB 换回来后可以正常导航,请问这是什么原因呢。
另附上我的 teb 参数:controller_server: ros__parameters: odom_topic: /odom use_sim_time: True controller_frequency: 20.0 controller_plugin_types: ["teb_local_planner::TebLocalPlannerROS"] goal_checker: plugin: "nav2_controller::SimpleGoalChecker" xy_goal_tolerance: 0.1 yaw_goal_tolerance: 0.08 stateful: True controller_plugins: ["FollowPath"] FollowPath: plugin: teb_local_planner::TebLocalPlannerROS teb_autosize: 1.0 dt_ref: 0.4 dt_hysteresis: 0.08 min_samples: 3 max_samples: 1000 global_plan_overwrite_orientation: True #覆盖全局路径中局部路径点的朝向 force_reinit_new_goal_dist: 1.0 allow_init_with_backwards_motion: False #允许在开始时想后退来执行轨迹 max_global_plan_lookahead_dist: 1.3 #考虑优化的全局计划子集的最大长度(累积欧几里得距离)(如果为0或负数:禁用;长度也受本地Costmap大小的限制) global_plan_viapoint_sep: 0.25 global_plan_prune_distance: 1.0 exact_arc_length: False #如果为真,规划器在速度、加速度和转弯率计算中使用精确的弧长[->增加的CPU时间],否则使用欧几里德近似 feasibility_check_no_poses: 2 publish_feedback: False # Robot max_vel_x: 0.5 max_vel_x_backwards: 0.1 max_vel_theta: 1.0 acc_lim_x: 1.0 acc_lim_theta: 1.5 is_footprint_dynamic: false min_turning_radius: 0.0 footprint_model: # types: "point", "circular", "two_circles", "line", "polygon" type: "circular" radius: 0.33 # for type "circular" free_goal_vel: False # Obstacles min_obstacle_dist: 0.02 #和障碍物最小距离 inflation_dist: 0.4 #障碍物膨胀距离 include_costmap_obstacles: True #costmap 中的障碍物是否被直接考虑 costmap_obstacles_behind_robot_dist: 1.0 obstacle_poses_affected: 15 dynamic_obstacle_inflation_dist: 0.4 #动态障碍物的膨胀范围 include_dynamic_obstacles: True #是否将动态障碍物预测为速度模型 legacy_obstacle_association: False #是否严格遵循局部规划出来的路径, costmap_converter_plugin: "costmap_converter::CostmapToPolygonsDBSMCCH" costmap_converter_spin_thread: True costmap_converter_rate: 10 # Optimization no_inner_iterations: 5 no_outer_iterations: 4 optimization_activate: True optimization_verbose: False penalty_epsilon: 0.07 obstacle_cost_exponent: 4.0 weight_max_vel_x: 2.0 weight_max_vel_theta: 1.0 weight_acc_lim_x: 1.0 weight_acc_lim_theta: 1.0 weight_kinematics_nh: 1000.0 weight_kinematics_forward_drive: 1000.0 weight_kinematics_turning_radius: 1.0 weight_optimaltime: 2.0 # must be > 0 weight_shortest_path: 0.0 weight_obstacle: 70.0 weight_inflation: 0.1 weight_dynamic_obstacle: 1000.0 # not in use yet weight_dynamic_obstacle_inflation: 0.1 weight_viapoint: 30.0 weight_adapt_factor: 2.0 # Homotopy Class Planner enable_homotopy_class_planning: False enable_multithreading: False max_number_classes: 4 selection_cost_hysteresis: 5.0 selection_prefer_initial_plan: 1.0 selection_obst_cost_scale: 1.0 selection_alternative_time_cost: True roadmap_graph_no_samples: 15 roadmap_graph_area_width: 5.0 roadmap_graph_area_length_scale: 1.0 h_signature_prescaler: 0.5 h_signature_threshold: 0.1 obstacle_heading_threshold: 0.45 switching_blocking_period: 0.0 viapoints_all_candidates: True delete_detours_backwards: True max_ratio_detours_duration_best_duration: 3.0 visualize_hc_graph: False visualize_with_time_as_z_axis_scale: 0.0 # Recovery shrink_horizon_backup: True shrink_horizon_min_duration: 10.0 oscillation_recovery: True oscillation_v_eps: 0.1 oscillation_omega_eps: 0.1 oscillation_recovery_min_duration: 10.0 oscillation_filter_duration: 10.0 -
-
朋友你好,我用的humble版本的ROS2,将DWB替换成TEB以后没法进行导航,请问你在更换planner的时候除了将上面的代码替换掉原来的planner之外,还进行别的配置了吗?
-
@小鱼 大佬你好,我用的humble的ROS2,在将fishbot的DWB更换成TEB之后没办法导航,地图膨胀层和局部代价地图加载不出来,请问你知道是怎么回事吗,我只讲controller_server进行了替换,没有进行其他配置
-
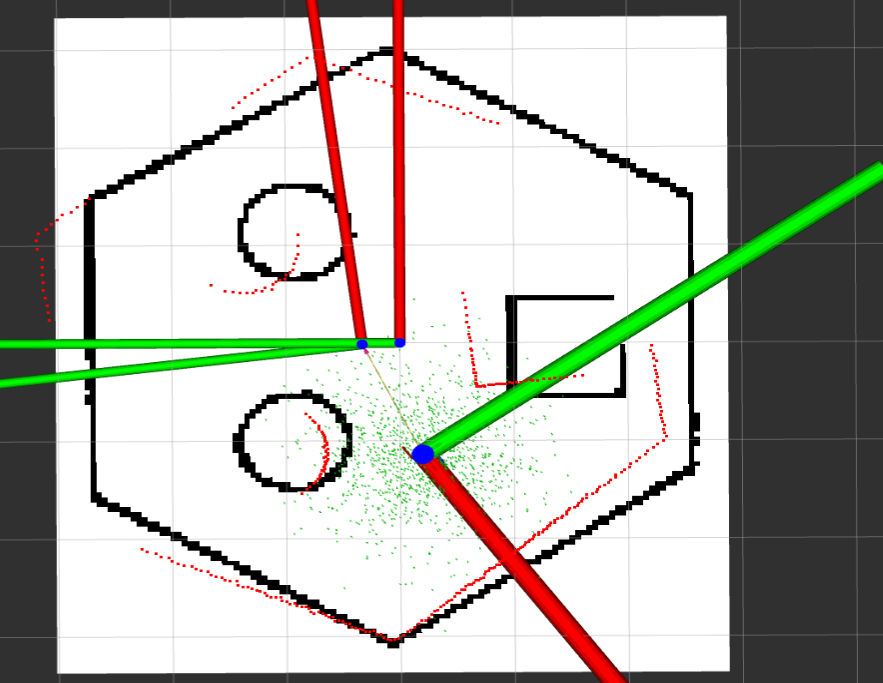
地图是这个样子的 -
此回复已被删除! -
此回复已被删除! -
此回复已被删除! -
-
@386894633 有社区移植的,https://blog.csdn.net/lgh1231/article/details/126342479 ,没有功能包二进制安装,只能源码安装。
-
@741390353 老哥解决了吗,我现在也是这个问题,运行默认dwb时是正常启动的
但是运行teb后就跑不起来
我的ros2是humble版本