NAV2导航错误
-
平台:Ubuntu20.04 ROS:FOXY 小车:fishbot四驱
问题:地图成功构建好后,按照教程加载到navigation2.launch.py程序中去,编译成功,然后运行后,按照问档设置起点和目标点,无法使小车导航移动。具体操作步骤和执行状态如下:
1、启动micro-ros命令:
sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6
状态正常,可以接收到话题
2、启动雷达驱动:
xhost + && sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -p 8889:8888 fishros2/fishbot_laser
在新开的RVIZ中可以看到雷达正常工作。
3、修改navigation2.launch.py程序,加载新建的地图
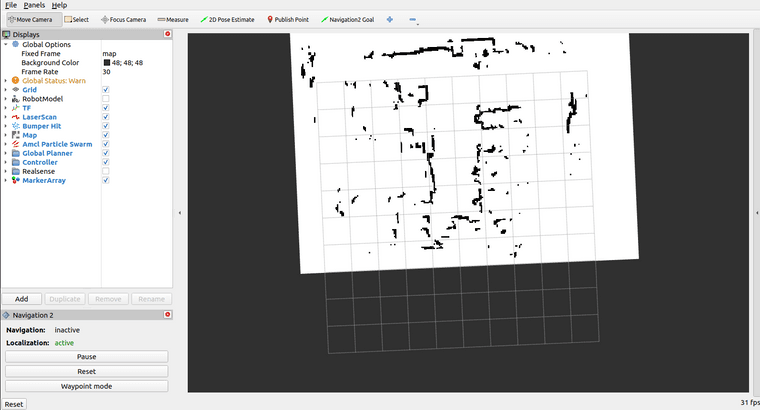
4、运行程序,加载地图如下
5、设置2D Pose Estimate 和 nav2 goal提示错误:
[amcl-2] [INFO] [1686665863.510768999] [amcl_rclcpp_node]: Message Filter dropping message: frame 'laser_frame' at time 1686665862.260 for reason 'Unknown'
[rviz2-10] [INFO] [1686665863.524613593] [rviz2]: Message Filter dropping message: frame 'laser_frame' at time 1686665862.260 for reason 'Unknown'
[amcl-2] [INFO] [1686665863.635999865] [amcl_rclcpp_node]: Message Filter dropping message: frame 'laser_frame' at time 1686665862.386 for reason 'Unknown'
[rviz2-10] [INFO] [1686665863.652530977] [rviz2]: Message Filter dropping message: frame 'laser_frame' at time 1686665862.386 for reason 'Unknown'
不知道问题出在了哪里? -
@2918095496 请更换版本到humble,ubuntu22,04