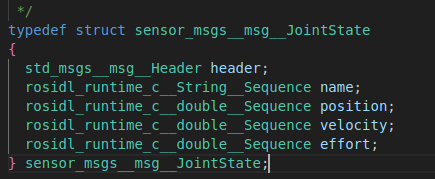
请问一下这部分结构体的·数据如何解析出来
-
-
@2630685712 .或者->就行了吧
-
@小鱼 msg->trajectory_start.joint_state.position 这样是可以获取到6个节点的数据吗
-
@2630685712 试试呗
-
@小鱼 ROS2钟msg->trajectory_start.joint_state.position【0】是获取的第一个节点的值,Microros不能加[0]
-
@小鱼 如何创建两个节点rclc_node_init_default(&node2, "topic_pub_test", "", &support); 这样貌似不行