@小鱼 那到底是哪个呢
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
2630685712 发布的最新帖子
-
RE: ROS2机械臂控制发布在 机械臂运动规划
@小鱼 鱼哥如果我要用Microros实现RVIZ和机械臂同步用A ction的话实现思路是怎样的 需不需要
#include <actionlib/server/simple_action_server.h>这个头文件 -
ROS2机械臂控制发布在 机械臂运动规划
ROS2中
control_msgs/action/follow_joint_trajectory这个例程有没有
#include <actionlib/server/simple_action_server.h> 这个文件ROS2中也找不到 -
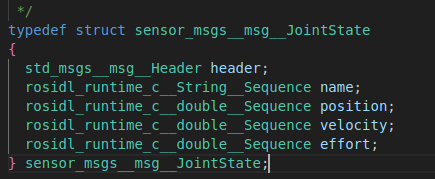
RE: 请问一下这部分结构体的·数据如何解析出来发布在 MicroROS
@小鱼 如何创建两个节点rclc_node_init_default(&node2, "topic_pub_test", "", &support); 这样貌似不行
-
RE: 请问一下这部分结构体的·数据如何解析出来发布在 MicroROS
@小鱼 ROS2钟msg->trajectory_start.joint_state.position【0】是获取的第一个节点的值,Microros不能加[0]
-
RE: 请问一下这部分结构体的·数据如何解析出来发布在 MicroROS
@小鱼 msg->trajectory_start.joint_state.position 这样是可以获取到6个节点的数据吗