Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you have been placed in read-only mode.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
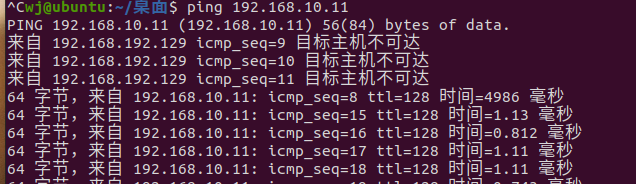
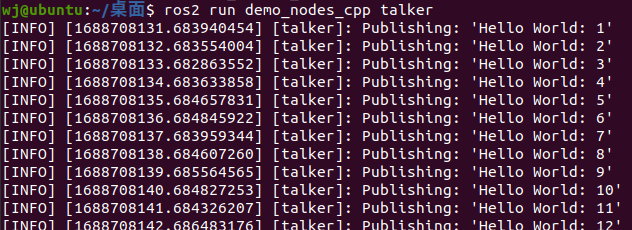
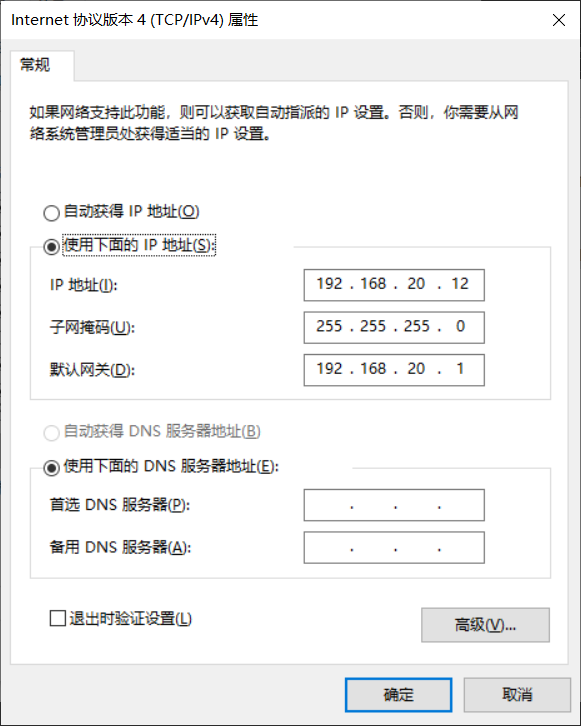
在 3 层交换机下设置了两个不同的 IP 地址。在两个不同的系统设备上设置这两个IP地址后,设备可以成功相互ping,但ROS 2无法通信(通过本机的ros2运行demo_nodes_cpp_talker,但是另一台电脑的ros2接收失败,它运行的为demo_nodes_py_listener) 我的电脑IP是192.168.20.12,另一个电脑IP是192.168.10.11。具体细节如下: 可以发现我能够成功ping通不同网段下的另外一台电脑: 由我的电脑进行发送消息如下: 但是此时在另外的电脑无法接收到信息: 我的windows的以太网IPV4设置以及虚拟机网络设置如下所示