在 3 层交换机下设置了两个不同的 IP 地址。在两个不同的系统设备上设置这两个IP地址后,设备可以成功相互ping,但ROS 2无法通信(通过本机的ros2运行demo_nodes_cpp_talker,但是另一台电脑的ros2接收失败,它运行的为demo_nodes_py_listener)
我的电脑IP是192.168.20.12,另一个电脑IP是192.168.10.11。具体细节如下:
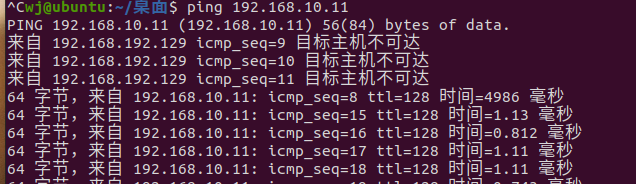
可以发现我能够成功ping通不同网段下的另外一台电脑:
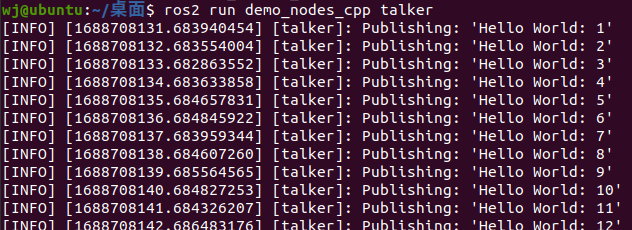
由我的电脑进行发送消息如下:
但是此时在另外的电脑无法接收到信息:

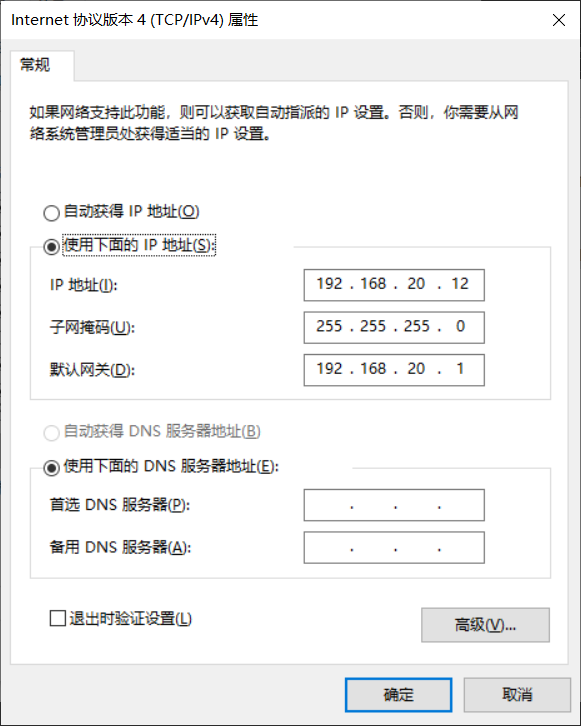
我的windows的以太网IPV4设置以及虚拟机网络设置如下所示

重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
5
595095124 发布的最佳帖子
-
实现不同网关下的ROS2通信发布在 ROS2
595095124 发布的最新帖子
-
实现不同网关下的ROS2通信发布在 ROS2
在 3 层交换机下设置了两个不同的 IP 地址。在两个不同的系统设备上设置这两个IP地址后,设备可以成功相互ping,但ROS 2无法通信(通过本机的ros2运行demo_nodes_cpp_talker,但是另一台电脑的ros2接收失败,它运行的为demo_nodes_py_listener)
我的电脑IP是192.168.20.12,另一个电脑IP是192.168.10.11。具体细节如下:
可以发现我能够成功ping通不同网段下的另外一台电脑:
由我的电脑进行发送消息如下:
但是此时在另外的电脑无法接收到信息:
我的windows的以太网IPV4设置以及虚拟机网络设置如下所示