动手学ros2 catrographer建图,没有/map话题但是Rviz2中不显示,Rviz2里也看不到雷达
-
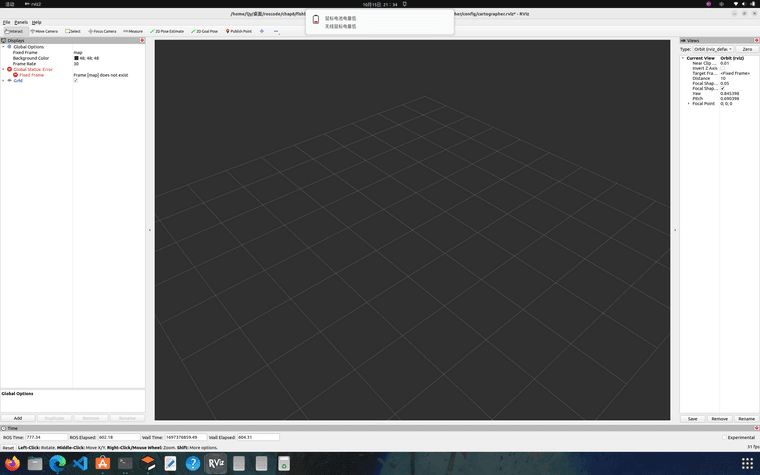 /home/ljy/图片/Screenshot-3.png
/home/ljy/图片/Screenshot-3.png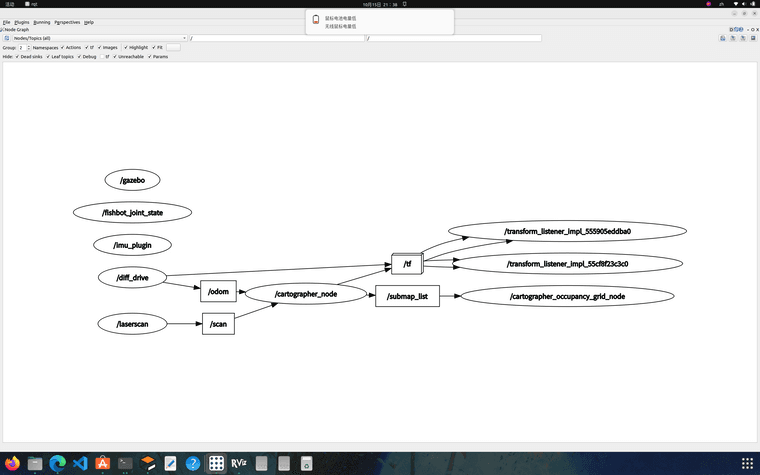 /home/ljy/图片/Screenshot-5.png
/home/ljy/图片/Screenshot-5.png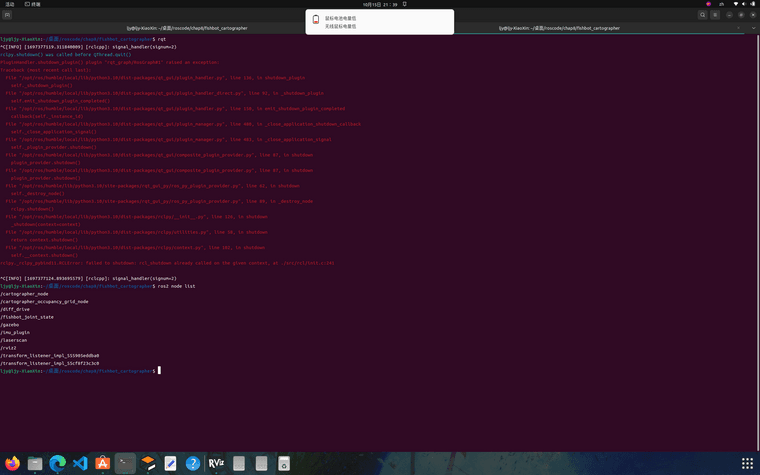 /home/ljy/图片/Screenshot-6.png
/home/ljy/图片/Screenshot-6.png这是cmakelists
cmake_minimum_required(VERSION 3.8) project(fishbot_cartographer) if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang") add_compile_options(-Wall -Wextra -Wpedantic) endif() install( DIRECTORY config launch rviz DESTINATION share/${PROJECT_NAME} ) # find dependencies find_package(ament_cmake REQUIRED) # uncomment the following section in order to fill in # further dependencies manually. # find_package(<dependency> REQUIRED) if(BUILD_TESTING) find_package(ament_lint_auto REQUIRED) # the following line skips the linter which checks for copyrights # comment the line when a copyright and license is added to all source files set(ament_cmake_copyright_FOUND TRUE) # the following line skips cpplint (only works in a git repo) # comment the line when this package is in a git repo and when # a copyright and license is added to all source files set(ament_cmake_cpplint_FOUND TRUE) ament_lint_auto_find_test_dependencies() endif() ament_package()ROS2学习 第十章 3. 配置Fishbot进行建图
有时候运行node list里有/map话题,但是rviz2里不显示有。把install那几句换了几个位置也都不对。 -
@1194100657 直接运行slam_toolbox 建图试试:
ros2 launch slam_toolbox online_async_launch.py use_sim_time:=False --- [INFO] [launch]: All log files can be found below /home/fishros/.ros/log/2023-10-02-22-52-36-917373-fishros-linux-79801 [INFO] [launch]: Default logging verbosity is set to INFO [INFO] [async_slam_toolbox_node-1]: process started with pid [79802] [async_slam_toolbox_node-1] [INFO] [1696258356.969203979] [slam_toolbox]: Node using stack size 40000000 [async_slam_toolbox_node-1] [INFO] [1696258356.987488838] [slam_toolbox]: Using solver plugin solver_plugins::CeresSolver [async_slam_toolbox_node-1] [INFO] [1696258356.987606280] [slam_toolbox]: CeresSolver: Using SCHUR_JACOBI preconditioner. [async_slam_toolbox_node-1] Info: clipped range threshold to be within minimum and maximum range! [async_slam_toolbox_node-1] [WARN] [1696258357.129191771] [slam_toolbox]: maximum laser range setting (20.0 m) exceeds the capabilities of the used Lidar (8.0 m) [async_slam_toolbox_node-1] Registering sensor: [Custom Described Lidar] -
我也遇到同样的问题呀,不得其解,你解决了么?
-
@yangchunlong1987 我也是这个问题,就用那个存起来的图片,然后开启rviz2,加载地图,rviz2就是显示没有收到/map,好奇怪