一键安装使用指南及常见问题解决方案
-
@Zhiqh1 出现依赖错误
-
@Fatal 在 一键安装使用指南及常见问题解决方案 中说:
香
为什么最后输入ros2就是未找到,明明前面是对的 -
-
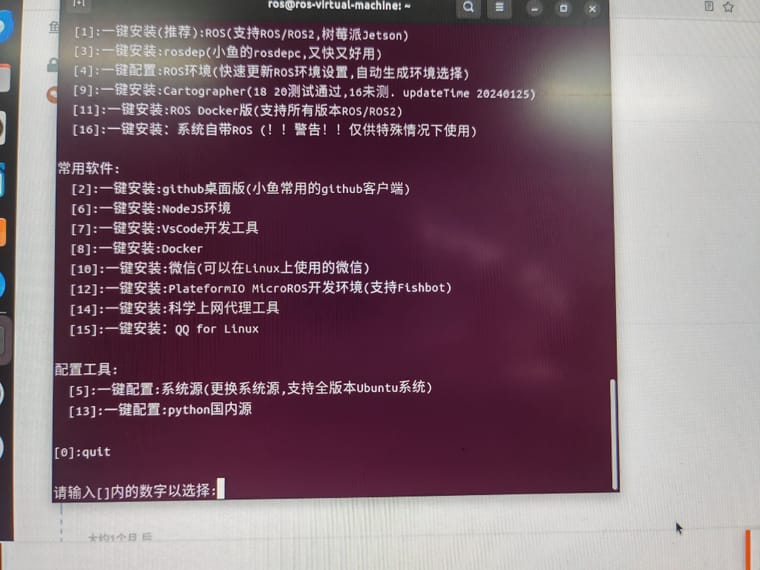
一键安装不支持ubuntu23.10吗? 使用的是树莓派5
-
RUN Choose Task:[请输入括号内的数字]
请选择你要安装的ROS版本名称(请注意ROS1和ROS2区别):
[1]:noetic(ROS1)
[2]:foxy(ROS2)
[3]:galactic(ROS2)
[4]:rolling(ROS2)
[0]:quit
大佬您好,我一键安装,没有humble选项 ,我的ubantu是20.04.6版本 ,我就先下了个foxy每次打开终端都会显示 ros:foxy(1) noetic(2) ?应该怎么选呀 ,现在我想下humble版本应该怎么解决牙
-
@1667352970 因为你是ubuntu20.04 所以找不到,ros版本和系统版本是有对应关系的
-
请问我在ubuntu2004上使用一键安装报错如下该怎么解决呢,该错误是将系统自带的python3.8升级成11后开始出现的,我将系统的python3软链接给pyhon311了
/tmp/fishinstall/to 100%[===================>] 43.60K --.-KB/s 用时 0.1s
2024-05-31 13:23:54 (380 KB/s) - 已保存 “/tmp/fishinstall/tools/base.py” [44650/44650])
WARN:No Yaml Module!
Traceback (most recent call last):
File "/tmp/fishinstall/install.py", line 123, in <module>
main()
File "/tmp/fishinstall/install.py", line 58, in main
from tools.base import CmdTask,FileUtils,PrintUtils,ChooseTask,ChooseWithCategoriesTask
File "/tmp/fishinstall/tools/base.py", line 773, in <module>
osversion = GetOsVersion()
^^^^^^^^^^^^^^
File "/tmp/fishinstall/tools/base.py", line 103, in GetOsVersion
import distro
ModuleNotFoundError: No module named 'distro' -
@1597854501 我现在已经尝试过pip3 distro,修改系统变量将3.11的site-package路径加到pythonpath,再次运行一键安装时读取状态信息也可以识别到distro,但到了“已保存/tmp/fishinstall/tools/base.py"后运行还是会报错No module named distro,请问这是怎么回事呢
-
@1597854501 更改etc/environment,添加pythonpath后,报错最终追溯到lsb_release,这是不是因为我修改系统默认python3.8到3.11导致的呢
-
@1597854501 破案了,我找到报错文件,将开头的python3改成python3.8即可,推测原因为系统自带的这些功能默认用python3去软链接系统自带的python3.8,但我升级后将python3软连接给了python3.11,python3.11并不支持系统的ls_release等功能,故须像上述一样主动修改python3为python11,希望大家对我的教训引以为戒吧
-
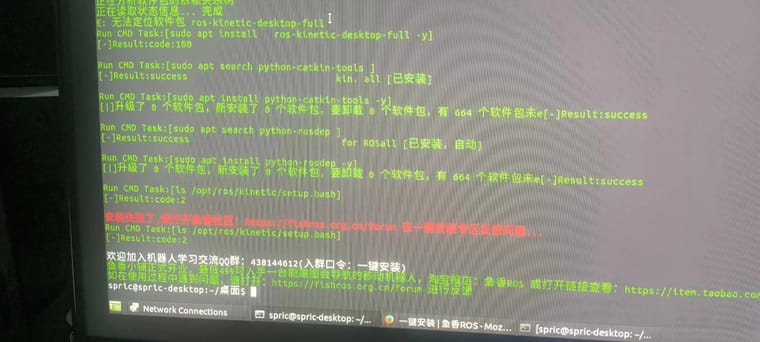
我在树莓派ubuntu mate 16.04 上安装ros1-Kinetic无法定位软件包
-
@2090127048 sudo pip install distro 或者 sudo pip3 install distro
-
RUN Choose Task:[请输入括号内的数字]
请选择你要安装的ROS版本名称(请注意ROS1和ROS2区别):
[1]:bouncy(ROS2)
[2]:crystal(ROS2)
[3]:dashing(ROS2)
[4]:eloquent(ROS2)
[5]:melodic(ROS1)
[0]:quit
请输入[]内的数字以选择:2
RUN Choose Task:[请输入括号内的数字]
请选择安装的具体版本(如果不知道怎么选,请选1桌面版):
[1]:crystal(ROS2)桌面版
[2]:crystal(ROS2)基础版(小)
[0]:quit
请输入[]内的数字以选择:2
Run CMD Task:[sudo apt search aptitude ]
[-][1.67s] Simple tool to mail about pending package updates - systemd versio[][1.67s] brain teaser game and trainer to have fun and to keep your brain t[-][1.67s] CMD Result:success es)Run CMD Task:[sudo apt install aptitude -y]
[-][0.00s] CMD Result:code:100Run CMD Task:[sudo apt install ros-crystal-ros-base -y]
E: Could not get lock /var/lib/dpkg/lock - open (11: Resource temporarily unavailable)
E: Unable to lock the administration directory (/var/lib/dpkg/), is another process using it?
Run CMD Task:[sudo apt install ros-crystal-ros-base -y]
[-][0.00s] CMD Result:code:100Run CMD Task:[ls /opt/ros/crystal/setup.bash]
[/][0.00s] ls: cannot access '/opt/ros/crystal/setup.bash': No such file or dir[-][0.00s] CMD Result:code:2安装失败了,请打开鱼香社区:https://fishros.org.cn/forum 在一键安装专区反馈问题...
Run CMD Task:[ls /opt/ros/crystal/setup.bash]
[/][0.00s] ls: cannot access '/opt/ros/crystal/setup.bash': No such file or dir[-][0.00s] CMD Result:code:2
请问这个改怎么解决 -
@2960110040 等一下吧,系统里有其他的程序在占用dpkg。一般是系统的自动更新
-
一键安装会安装moveit吗
-
HELP:
问题:roscore报错:
... logging to /home/nuc/.ros/log/d5a6d328-d4ad-11ef-8b12-d1928152a029/roslaunch-nuc-BQM5-36720.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.RLException: Unable to contact my own server at [http://192.168.31.213:44895/].
This usually means that the network is not configured properly.A common cause is that the machine cannot connect to itself. Please check
for errors by running:ping 192.168.31.213For more tips, please see
http://wiki.ros.org/ROS/NetworkSetupThe traceback for the exception was written to the log file
描述:本来有一个foxy版本ROS,后来又一键安装了一个noetic的版本,然后在网上搜索后把foxy版本的删除了,现在又通过一键安装下载回来了现在每次打开终端之后,会先有这个询问:ros:foxy(1) noetic(2) ?
我输入 2 换行后,输入roscore,出现上述问题。