机器人在单点导航时不规划路径
-
背景(可选):
ubuntu22.04 ros2humble nav2 里程计使用laser_scan_matcher
实现小车导航,用的是小鱼教程里面的nav2。
tf树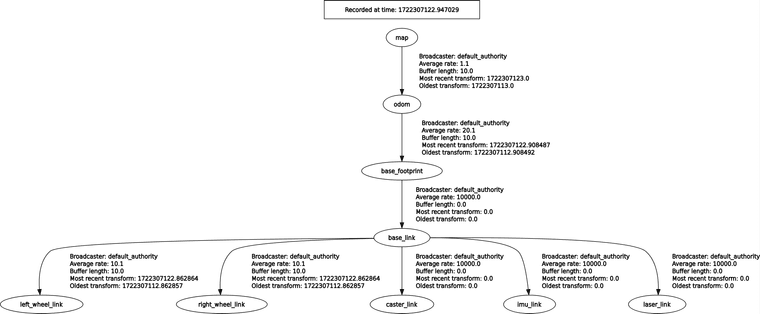
在navigation2.launch.py中的代码如下
import os import launch import launch_ros from ament_index_python.packages import get_package_share_directory from launch.launch_description_sources import PythonLaunchDescriptionSource def generate_launch_description(): # 获取与拼接默认路径 fishbot_navigation2_dir = get_package_share_directory( 'fishbot_navigation2') nav2_bringup_dir = get_package_share_directory('nav2_bringup') rviz_config_dir = os.path.join( nav2_bringup_dir, 'rviz', 'nav2_default_view.rviz') # 创建 Launch 配置 use_sim_time = launch.substitutions.LaunchConfiguration( 'use_sim_time', default='false') map_yaml_path = launch.substitutions.LaunchConfiguration( 'map', default=os.path.join(fishbot_navigation2_dir, 'maps', 'imu_map.yaml')) nav2_param_path = launch.substitutions.LaunchConfiguration( 'params_file', default=os.path.join(fishbot_navigation2_dir, 'param', 'fishbot_nav2.yaml')) return launch.LaunchDescription( [ # 声明新的 Launch 参数 launch.actions.DeclareLaunchArgument('use_sim_time', default_value=use_sim_time, description='Use simulation (Gazebo) clock if true'), launch.actions.DeclareLaunchArgument('map', default_value=map_yaml_path, description='Full path to map file to load'), launch.actions.DeclareLaunchArgument('params_file', default_value=nav2_param_path, description='Full path to param file to load'), launch.actions.IncludeLaunchDescription( PythonLaunchDescriptionSource( [nav2_bringup_dir, '/launch', '/bringup_launch.py']), # 使用 Launch 参数替换原有参数 launch_arguments={ 'map': map_yaml_path, 'use_sim_time': use_sim_time, 'params_file': nav2_param_path}.items(), ), launch_ros.actions.Node( package='rviz2', executable='rviz2', name='rviz2', arguments=['-d', rviz_config_dir], parameters=[{'use_sim_time': use_sim_time}], output='screen'), launch_ros.actions.Node( package='nav2_map_server', executable='map_server', name='map_server', output='screen', parameters=[{'use_sim_time': False}, {'yaml_filename':map_yaml_path}], ), launch_ros.actions.Node( package='nav2_lifecycle_manager', executable='lifecycle_manager', name='lifecycle_manager_mapper', output='screen', parameters=[{'use_sim_time': False}, {'autostart': True}, {'node_names': ['map_server']}], ), launch_ros.actions.Node( package='nav2_amcl', executable='amcl', name='amcl', output='screen', ), # 生命循环节点也同样需要启动 launch_ros.actions.Node( package='nav2_lifecycle_manager', executable='lifecycle_manager', name='lifecycle_manager_mapper', output='screen', parameters=[{'use_sim_time': False}, {'autostart': True}, {'node_names': ['amcl']}] , ), ] )加了amcl和mapserver
如果没有写上面的mapserver,不会在rviz中显示地图问题描述:
小车无法进行单点导航
具体细节和上下文:
这是终端内的报错,有三点
[component_container_isolated-1] [INFO] [1722307497.353478349] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722307497.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [amcl-5] [INFO] [1722307497.986480663] [amcl]: Message Filter dropping message: frame 'laser_link' at time 1722307496.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1722310347.323473487] [rviz2]: NavigateToPose will be called using the BT Navigator's default behavior tree. [rviz2-2] [ERROR] [1722310347.323740453] [rviz2]: Goal was rejected by serverrviz:
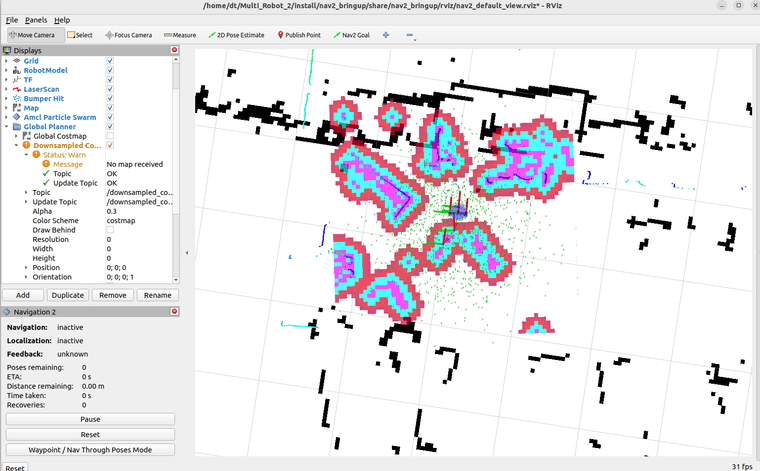
其中一个planner下的组件显示没有接受到地图,nav和location显示inactive -
根据您提供的信息和错误日志,我们可以分析并尝试解决小车在单点导航时遇到的问题。以下是一些可能的原因和解决方案:
1. 时间戳问题
错误日志中的
Message Filter dropping message指出接收到的时间戳早于当前变换缓存中的时间戳。这通常是由于传感器数据(如激光扫描数据)或地图服务器发送的数据时间戳与ROS系统时间不同步或延迟过大导致的。解决方案:
- 确保所有节点的
use_sim_time参数设置正确。如果您的系统是基于物理的(非仿真),确保use_sim_time设置为false。 - 检查并优化系统的网络延迟和处理器负载,确保传感器数据能够及时处理。
- 检查并校准传感器的时间戳生成逻辑,确保它们与ROS系统时间同步。
2. AMCL 节点问题
AMCL(自适应蒙特卡洛定位)节点也报告了时间戳问题,这可能是因为它依赖的激光扫描或其他定位数据没有及时更新。
解决方案:
- 确保 AMCL 节点能够接收到有效的激光扫描数据和其他必要的定位信息。
- 检查 AMCL 的配置文件,确保所有必要的参数都已正确设置。
3. 地图服务器和变换问题
如果 RViz 显示“planner下的组件显示没有接受到地图”,这通常意味着地图数据没有正确加载或变换(TF)没有正确设置。
解决方案:
- 确保地图文件 (
imu_map.yaml) 正确无误,并且地图服务器 (map_server) 正在运行且能正确加载地图。 - 检查 TF 树,确保所有必要的变换(如从
base_link到map的变换)都已正确设置并发布。 - 在 RViz 中使用 TF 插件来可视化 TF 树,检查是否有缺失的变换或错误的连接。
4. 导航配置和状态
如果
nav和location显示为inactive,这可能是因为导航堆栈的某些部分没有正确启动或配置。解决方案:
- 检查
fishbot_nav2.yaml文件中的配置,确保所有必要的导航参数都已正确设置。 - 使用
ros2 service call /liftcycle_manager_mapper/get_state lifecycle_msgs/srv/GetState命令来检查 AMCL 和其他导航相关节点的状态。 - 确保
lifecycle_manager正在管理所有相关的导航节点,并且它们都处于激活状态。
5. RViz 配置
确保 RViz 的配置正确,特别是与导航相关的插件(如目标设置、路径规划显示等)已正确配置。
总结:
您的问题可能涉及多个方面,包括时间戳同步、地图加载、TF 设置、导航配置以及 RViz 配置。建议逐一检查这些方面,并根据上述建议进行调整。如果问题仍然存在,可能需要更详细地检查系统日志或增加调试输出来进一步诊断问题。
以上为生成回答,仅供参考~
- 确保所有节点的
-
@1814638019 在 机器人在单点导航时不规划路径 中说:
[rviz2-2] [INFO] [1722310347.323473487] [rviz2]: NavigateToPose will be called using the BT Navigator's default behavior tree.
[rviz2-2] [ERROR] [1722310347.323740453] [rviz2]: Goal was rejected by server应该还有更进一步的日志信息
-
@小鱼 终端内的能截取到的全部代码
[component_container_isolated-1] [INFO] [1722328690.796172177] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328690.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328690.796172158] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328690.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328690.862376438] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328690.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328690.862376512] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328690.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328690.929077694] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328690.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328690.929077741] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328690.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328692.926502540] [lifecycle_manager_navigation]: Server behavior_server connected with bond. [component_container_isolated-1] [INFO] [1722328692.926562950] [lifecycle_manager_navigation]: Activating bt_navigator [component_container_isolated-1] [INFO] [1722328692.926919164] [bt_navigator]: Activating [component_container_isolated-1] [ERROR] [1722328692.927391217] [bt_navigator]: Caught exception in callback for transition 13 [component_container_isolated-1] [ERROR] [1722328692.927425842] [bt_navigator]: Original error: Error at line 12: -> Node not recognized: RemovePassedGoals [component_container_isolated-1] [WARN] [1722328692.927490205] [bt_navigator]: Error occurred while doing error handling. [component_container_isolated-1] [FATAL] [1722328692.927522578] [bt_navigator]: Lifecycle node bt_navigator does not have error state implemented [component_container_isolated-1] [ERROR] [1722328692.927960623] [lifecycle_manager_navigation]: Failed to change state for node: bt_navigator [component_container_isolated-1] [ERROR] [1722328692.927993540] [lifecycle_manager_navigation]: Failed to bring up all requested nodes. Aborting bringup. [component_container_isolated-1] [INFO] [1722328693.261125604] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328692.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328693.261125486] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328692.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328693.328029683] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328693.328058336] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328693.394960022] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328693.395025228] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328693.461230244] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328693.461284224] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328693.528123912] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328693.528132964] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328693.595115140] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328693.595178439] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328693.661358248] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328693.661360080] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328693.728752758] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328693.728786474] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328693.795139915] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328693.795190506] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328693.862338103] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328693.862341684] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328693.929241307] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328693.929241211] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328693.996267304] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328693.996277213] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.062965045] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.063067200] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.129994316] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.130068307] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.196350259] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.196350253] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.263199813] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.263200010] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328693.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.329758524] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.329758713] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.396765256] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.396819624] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.462762505] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.462789260] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.529939233] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.530058021] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.596301286] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.596302698] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.663413611] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.663413718] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.730333632] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.730535289] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.796904071] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.796904433] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.863666504] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.863701495] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.929720717] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.929762923] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.996976483] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328694.996983951] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328695.063808607] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328695.063808565] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328695.130950916] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328695.131014258] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328695.197405303] [global_costmap.global_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [INFO] [1722328695.197411902] [local_costmap.local_costmap]: Message Filter dropping message: frame 'laser_link' at time 1722328694.000 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] Start navigation [rviz2-2] [INFO] [1722328746.600351549] [rviz2]: NavigateToPose will be called using the BT Navigator's default behavior tree. [rviz2-2] [ERROR] [1722328746.602093016] [rviz2]: Goal was rejected by server -
@小鱼 感谢您的回复
-
@1814638019 在 机器人在单点导航时不规划路径 中说:
[component_container_isolated-1] [ERROR] [1722328692.927425842] [bt_navigator]: Original error: Error at line 12: -> Node not recognized: RemovePassedGoals
问题应该出在这里,你有修改行为树吗
-
@小鱼 没修改过
-
@小鱼 从学ros2 那里下载的源码 只修改了fishbot文件夹里面launch和params部分
-
@小鱼 是这里的代码吗?
navigation2/nav2_bt_navigator/behavior_trees navigate_to_pose_w_replanning_goal_patience_and_recovery.xml <!-- This Behavior Tree replans the global path periodically at 1 Hz through an array of poses continuously and it also has recovery actions specific to planning / control as well as general system issues. --> <root main_tree_to_execute="MainTree"> <BehaviorTree ID="MainTree"> <RecoveryNode number_of_retries="6" name="NavigateRecovery"> <PipelineSequence name="NavigateWithReplanning"> <RateController hz="0.333"> <RecoveryNode number_of_retries="1" name="ComputePathThroughPoses"> <ReactiveSequence> <RemovePassedGoals input_goals="{goals}" output_goals="{goals}" radius="0.7"/> <ComputePathThroughPoses goals="{goals}" path="{path}" planner_id="GridBased"/> </ReactiveSequence> <ClearEntireCostmap name="ClearGlobalCostmap-Context" service_name="global_costmap/clear_entirely_global_costmap"/> </RecoveryNode> </RateController> <RecoveryNode number_of_retries="1" name="FollowPath"> <FollowPath path="{path}" controller_id="FollowPath"/> <ClearEntireCostmap name="ClearLocalCostmap-Context" service_name="local_costmap/clear_entirely_local_costmap"/> </RecoveryNode> </PipelineSequence> <ReactiveFallback name="RecoveryFallback"> <GoalUpdated/> <RoundRobin name="RecoveryActions"> <Sequence name="ClearingActions"> <ClearEntireCostmap name="ClearLocalCostmap-Subtree" service_name="local_costmap/clear_entirely_local_costmap"/> <ClearEntireCostmap name="ClearGlobalCostmap-Subtree" service_name="global_costmap/clear_entirely_global_costmap"/> </Sequence> <Spin spin_dist="1.57"/> <Wait wait_duration="5"/> <BackUp backup_dist="0.30" backup_speed="0.05"/> </RoundRobin> </ReactiveFallback> </RecoveryNode> </BehaviorTree> </root> -
@1814638019 你下载的是哪个版本的
-
此回复已被删除! -
@小鱼
大佬,我直接用的你的工作空间
-
@1814638019 这个版本我还真不确定能不能用,主要是参数比较老了,nav2在更新,建议手动的按照教程配一遍参数,推荐下新书里的导航配置过程:书籍&社区铭牌购买链接:https://item.taobao.com/item.htm?id=819899547761