-
在fishbot中使用指令:
ros2 launch fishbot_cartographer cartographer.launch.py
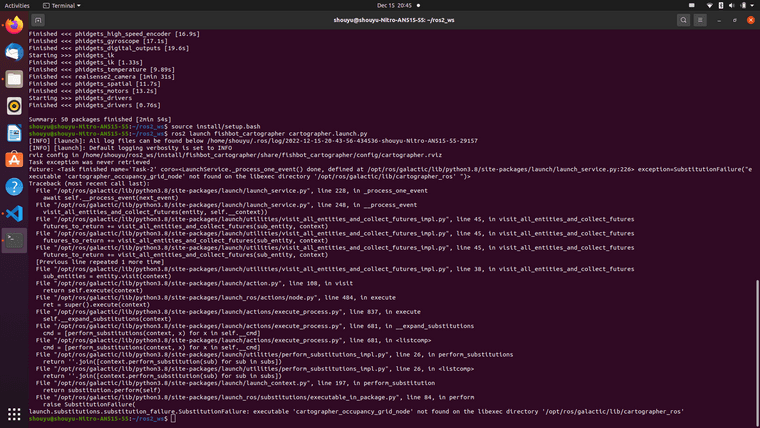
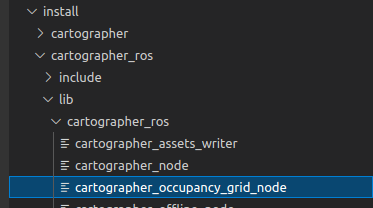
按照源码launch文件出现的问题:在install中找不到executable文件occupancy_grid_node,不能运行。
报错日志:
[ERROR] [launch]: Caught exception in launch (see debug for traceback): executable 'occupancy_grid_node' not found on the libexec directory '/home/gh/d2lros2/fishbot_ws/install/cartographer_ros/lib/cartographer_ros'将excutable修改成cartographer_occupancy_grid_node后运行报错,能打开rviz、看到节点信息,但是没有内容。
报错日志:
[cartographer_node-1] *** Check failure stack trace: ***
[cartographer_node-1] @ 0x7fc157e74b03 google::LogMessage::Fail()
...
[ERROR] [cartographer_node-1]: process has died [pid 6447, exit code -6, cmd '/home/gh/d2lros2/fishbot_ws/install/cartographer_ros/lib/cartographer_ros/cartographer_node -configuration_directory /home/gh/d2lros2/fishbot_ws/install/fishbot_cartographer/share/fishbot_cartographer/config -configuration_basename fishbot_2d.lua --ros-args -r __node:=cartographer_node --params-file /tmp/launch_params_385e5n3y'].
[rviz2-3] [INFO] [1656686194.581945380] [rviz2]: Message Filter dropping message: frame 'map' at time 0.000 for reason 'discarding message because the queue is full' -
 小 小鱼 从 中的 社区&开源 移动了该主题
小 小鱼 从 中的 社区&开源 移动了该主题
-
@追逐我的明天 在 Gazebo仿真时遇到问题Message Filter dropping message 中说:
问题报错如下
[rviz2-4] [INFO] [1656707687.122864239] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 4328.021 for reason 'discarding message because the queue is full'问题来源
tf树上没有节点想要的转,发现是rviz2上的选项选成了map,因为此时还未发布map,改成已有的坐标系即可
建图节点正常启动后改错误也会自行消失。
-
此回复已被删除! -
@追逐我的明天
请问 你是如何解决 这个问题的 ‘按照源码launch文件出现的问题:在install中找不到executable文件occupancy_grid_node,不能运行。‘’’我有occupancy_grid_node, 但不知道为什么launch file 找不到
-