机械臂连接报错
-
输入roslaunch motoman_driver robot_interface_streaming_yrc1000.launch robot_ip:=192.168.2.13连接机械臂的时候,终端有警告如下

有无大佬指点一下为什么 -
@787500229 ping的通吗
-
@小鱼 ping可以接通,现在就是有时候接上势能 有时候连势能都接通不了,然后接通势能之后,控制rviz移动机械臂执行轨迹就会报错
势能失败:
势能成功后移动机械臂直接就会报错,然后自动下势能,报错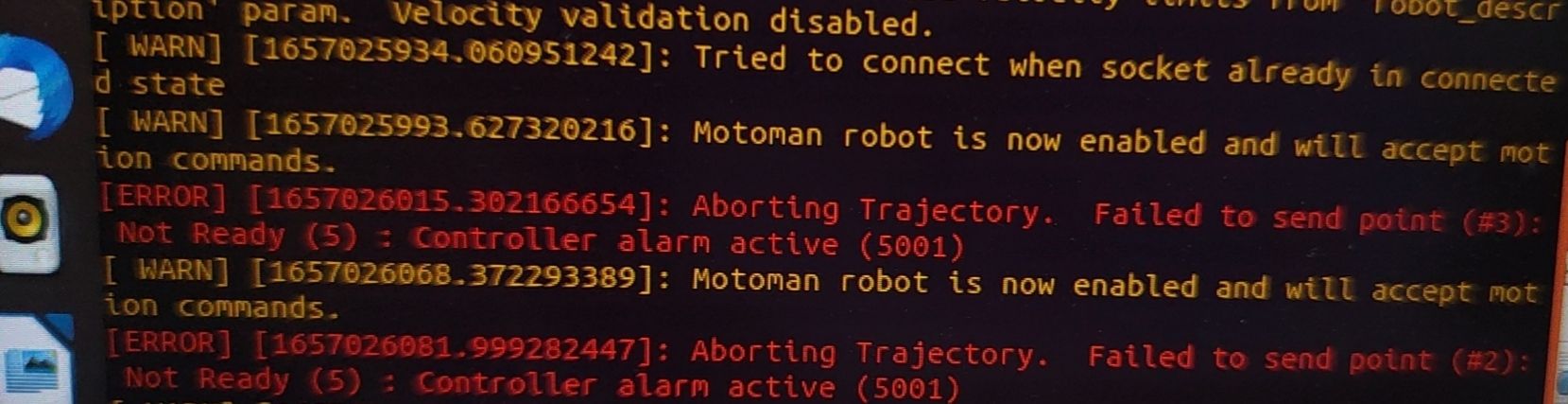
-
@787500229 看报错是机器人伺服电机没有上使能,看看机器人手册。
另外错误尽量复制粘贴,我好复制帮你搜索 -
@小鱼 鱼哥这是当前遇到一些问题,
警告:
Failed to get '~port' parameter: using default
Unable to read velocity limits from ' robot_ descriptionparam. Velocity validation disabled .
Tried to connect when socket already in connected state
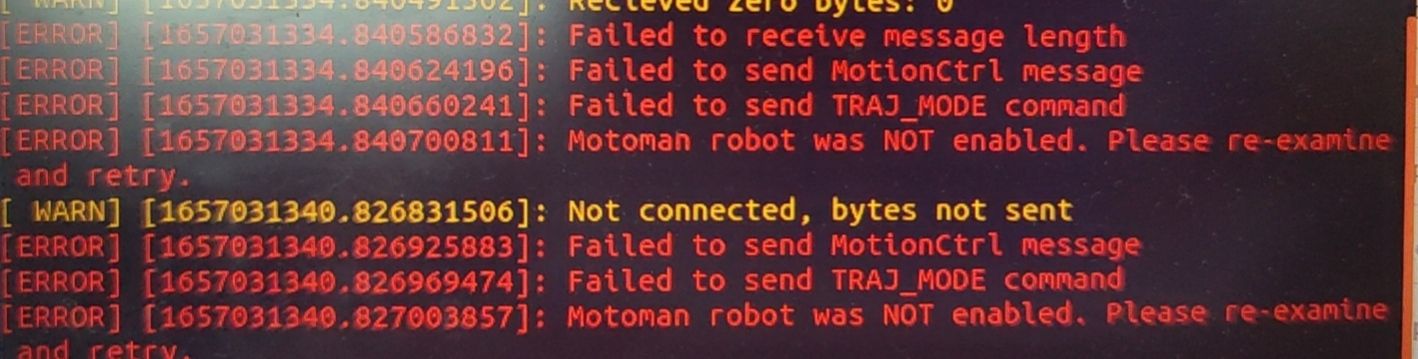
错误:
Failed to receive message length
Failed to send MotionCtrl message
Failed to send TRAJ_MODE commend
然后我是通过终端rosservice call robot_enable来上使能的,就会遇到上面的错误信息
现在的情况是,有时候可以连接机械臂 然后通过rviz移动是可以控制真实机械臂执行的,但上面的警告还是有的,有时候是使能都上不了,直接报以上的错误