STM32系列MICROROS环境配置(更新 使用cmake管理)
-
@DedSecer 这个就可能是agent这边或者固件那边的逻辑问题了,最近我也在解决这个问题,我参考了arduino 版本的microros 中有个demo是关于agent重连的,不过没实现我理想的功能
 (我也没试过Arduino版本的重连demo是什么样的情况,因为每次重连,microros的api并没有正常返回我想要的数据),链接我这边给你,你也可以参考一下
(我也没试过Arduino版本的重连demo是什么样的情况,因为每次重连,microros的api并没有正常返回我想要的数据),链接我这边给你,你也可以参考一下https://github.com/micro-ROS/micro_ros_arduino/tree/kilted/examples/micro-ros_reconnection_example
-
@DedSecer 现在根据那个demo修改的代码我这边会出现的情况是,只要是上位机那边退出程序再打开程序,microros给的api ping的返回值结果还是未连接,不知道是不是我这边代码逻辑还是有问题啥的…你如果感兴趣也可以看一下,讨论一下

-
@2475887309 好,我这边研究一下
-
@2475887309 在 STM32系列MICROROS环境配置(更新 使用cmake管理) 中说:
${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/Src/custom_memory_manager.c ${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/Src/microros_allocators.c ${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/Src/microros_time.c ${PROJECT_SOURCE_DIR}/Third-party/Lib_Microros/Src/microros_transports/dma_transport.c这四个文件没有怎么办

-
@2039235330 这几个文件在extera source里面
-
@2475887309 好的好的,我找找,我可以在windows系统上的stm32开发环境中使用嘛,和jetson中的ros2连接

-
@2475887309 可是我没有找到extera source这个文件
 佬,这是为什么
佬,这是为什么 -
@2039235330 可以编译即可,这个系统不影响,只不过win可能麻烦一点(得有ros2环境,或者方便点就直接在Jetson上面去给stm32编译也行,通用的)
-
@2039235330 下面链接里面有https://github.com/micro-ROS/micro_ros_stm32cubemx_utils/tree/kilted/extra_sources
-
作者你好,我的ROS版本为Dashing,因为系统为ubuntu18.04,microROS最高支持到dashing。在按照你的教程执行到
ros2 run micro_ros_setup create_firmware_ws.sh generate_lib generic一步中,输出提示
Non valid RTOS/Platform: generate_lib/generic Available platforms: . freertos +-- crazyflie21 +-- olimex-stm32-e407 . host +-- generic . nuttx +-- olimex-stm32-e407 . raspbian +-- generic . zephyr +-- discovery_l475_iot1 +-- olimex-stm32-e407看样子可能是因为dashing版本的microROS还不支持通用Lib编译。一开始我用的jazzy版本就没这个问题。请问怎么解决呢?单片机为STM32F407VGT6
-
ros2 run micro_ros_setup build_firmware.sh $(pwd)/firmware/mcu_ws/toolchain.cmake $(pwd)/firmware/mcu_ws/colcon.meta
dalao, wozhegemeicidouyunxingbuguo,xianshifail -
@宇文修 先确定dashing版本有没有支持microros agent功能包,如果支持你可以用其他的ros版本生成lib(不过这个我没试过),如果dashing版本不支持microros agent的话,就算生成了库文件也不一定能使用了
-
@gwlove 截图啥的,或者来个日志啊
-
2 2475887309 在 中 引用了 这个主题
-
@2475887309 大佬
我烧录成功了,但是重新上电过后还是不行(用的stm32f407g-disc1)
-
@3598783181 先启动agent,再链接stm32上电
-
@2475887309 我试过了,也连接不上。真的要崩溃了
-
@3598783181 下午我给你一个固件烧录试试看
-
@3598783181 我刚刚按照流程重新生成了一个固件,emmm,我这边也是跟你一样的的情况,我也对比了我现在的工程流程,也没有多少差异,暂时没有找到问题所在,不过我现在工程是能够跑的,流程一样,是STM32断电,先启动linux的agent再给STM32上电连接串口(本工程用的是UART3作为上位机通信的接口),我把链接给你先试试能不能通信,如果能通信,那大概率是代码流程哪边有点问题,这个我后续再找一下原因(这个工程是半成品,有许多bug,只是验证通信功能的)
通过网盘分享的文件:MicroROSF4_Cmake.rar 链接: https://pan.baidu.com/s/15w_W3KOaqZTPafxBQEGAjQ?pwd=9pjv 提取码: 9pjv运行结果看下图
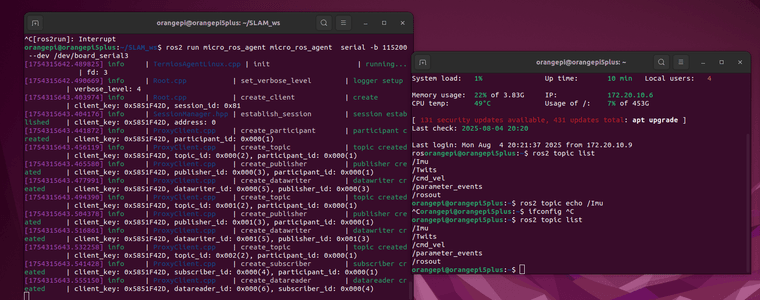
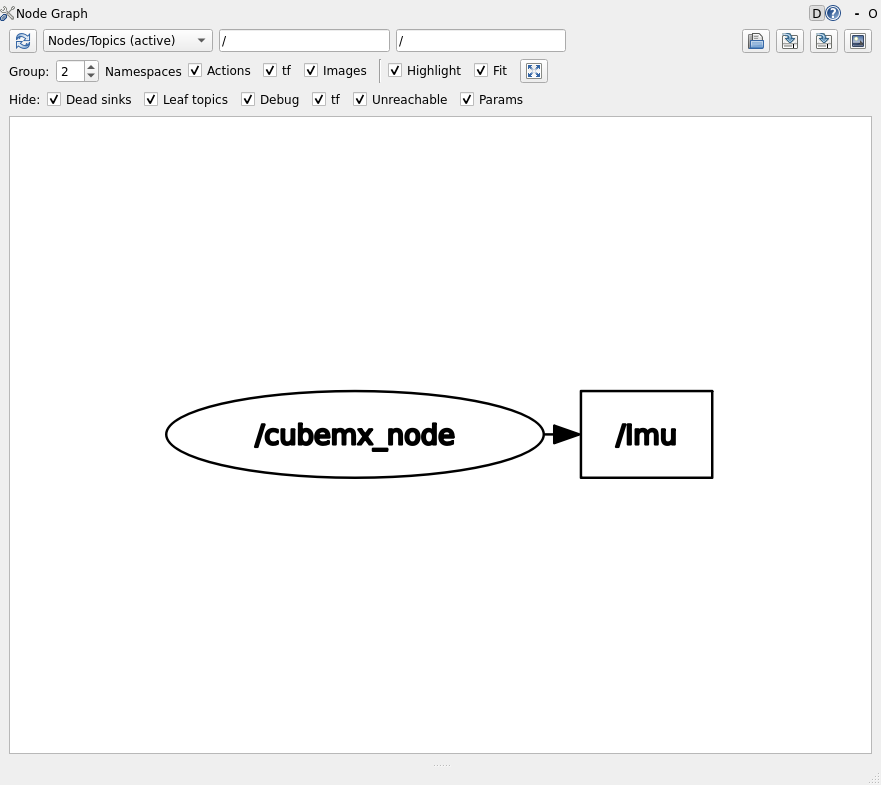
右侧会多出两个话题,rqt能看到节点图(如果你有imu的话)
-
-
@2475887309 感谢!!!
-
@2475887309 在 STM32系列MICROROS环境配置(更新 使用cmake管理)
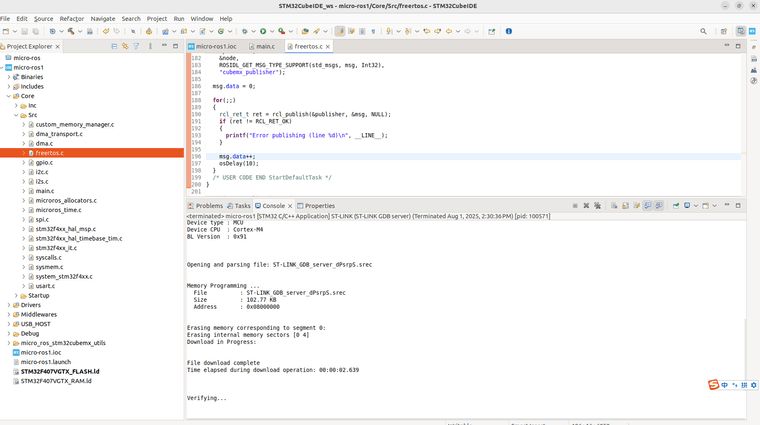
@2475887309 大佬,我用的是官网的做法去创建静态库的,然后我创建自定义消息接口的时候能成功导入头文件但是出现了一个问题
/home/xjl/STM32CubeIDE/workspace_1.19.0/microros1/Debug/../Core/Src/freertos.c:200:(.text.StartDefaultTask+0xa6): undefined reference to `rosidl_typesupport_c__get_message_type_support_handle__xjl__msg__WriteCommand'