moveit和gazebo联合仿真时,启动launch文件rviz一直打不开
-
 图片地址)
图片地址)  图片地址)
图片地址)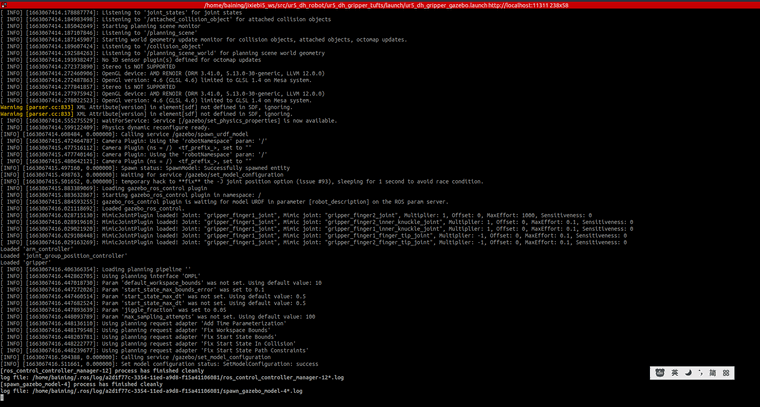
-
@亖卍冇卌 第一次遇到,怀疑是插件参数问题,建议你把launch文件中的自定义的配置去掉,看看能不能启动一个空的rviz
-
@小鱼 大佬你好,我将launch文件的配置注释掉后能打开一个空的rviz
-
@亖卍冇卌 能打开后就一个个插件添加上看看,应该是某一个插件有问题
-
@小鱼 我也是遇到这个问题。ros noetic+ubuntu20.04_gazebo11。错误在于
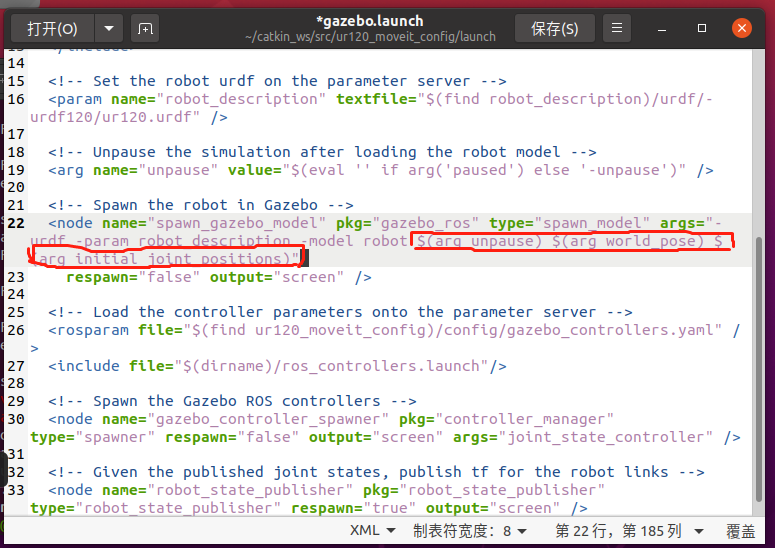
这里如果是自动生成,未修改的话,可以打开gazebo+rviz,但是gazebo里面就一直抖动。
修改成
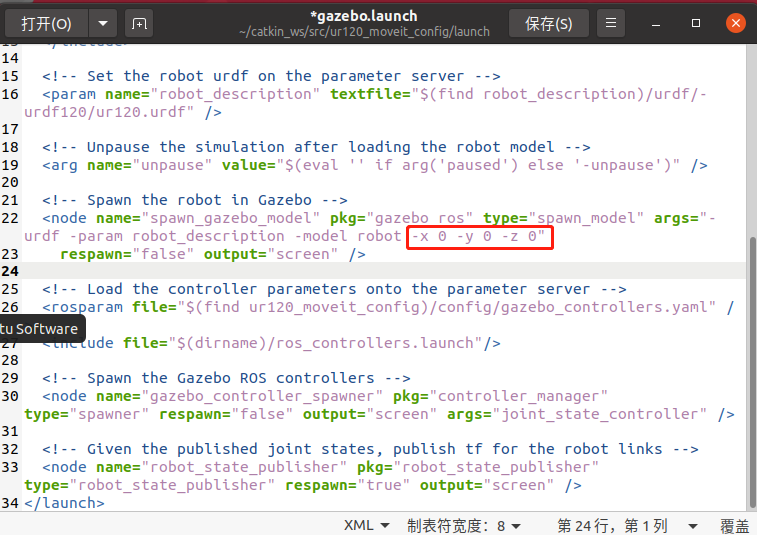
就只能显示gazebo,而rviz一直处于initialing界面。 -
@767015514 解决了 不修改gazebo.launch。因为存在gazebo打开存在抖动,想要消抖,后来参考链接文本这个在urdf的base_link部分增加代码后,gazebo里面的机械臂就没有抖动了。