moveit生成的demo找不到fake_execution
-
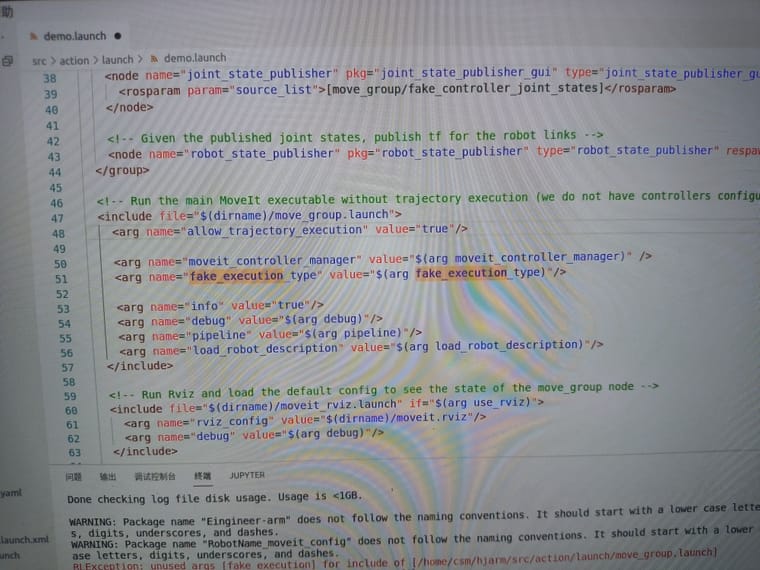
demo文件中只有fake_execution_type,没有fake_execution,是我在配置moveit的时候配错了吗?
-
@1306055164 同问
-
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
系统版本,ROS版本,前后操作,终端日志
啥版本的系统?
ubuntu20.04 应该是没有的,如何实现可以参考这里:可以参考艾利特机械臂的ros驱动——https://github.com/Elite-Robots/ROS
-
@小鱼 请问参考了这个代码,发现它里面控制虚拟和真实的代码是一样的,还是没太明白应该怎么改,fake_execution_type后面不是应该跟着
interpolate: 在经过关键点时执行平稳插补,默认用于可视化。
via points: 遍历关键点,但不插补它们之间的点,用于可视化调试。
last point: 直接跳转到轨迹的最后一个点,用于离线基准测试。
以上三个参数吗,那怎么把虚拟的改为真实的啊,求大佬解答 -
@1306055164 请问解决了吗,大佬