[FishBot教程] 9.0.3. 主控板固件烧录与配置
-
@zwz2003 多试几次,还不行就一键安装选17,更换几个代理
-
此回复已被删除! -
小鱼您好,我是用的是ubuntu22.04 humble版本。
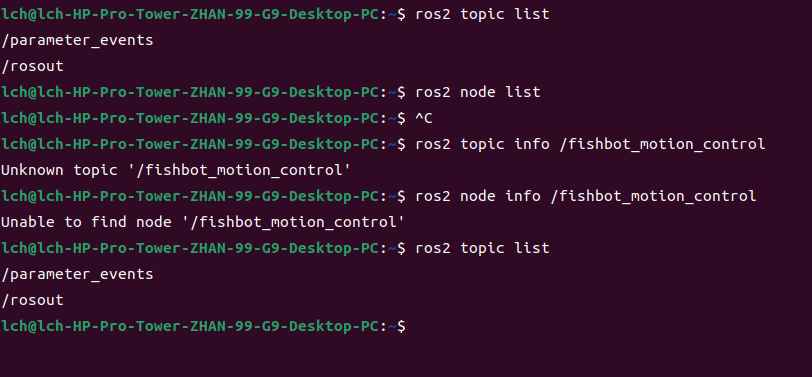
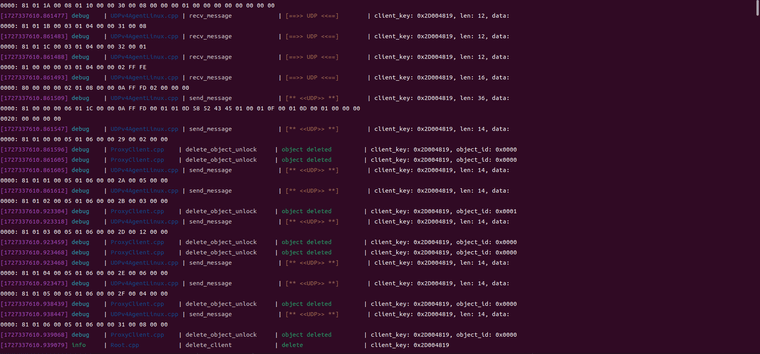
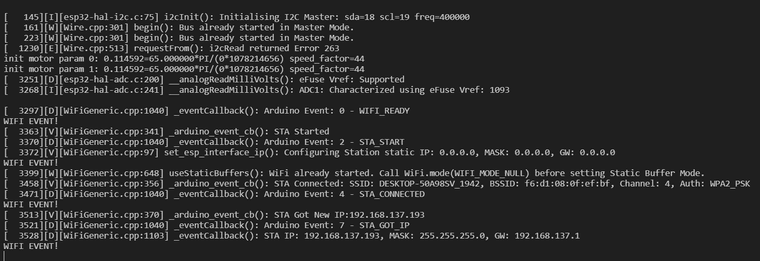
我进行到“输入ros2 topic list,fishbot相关话题就出来了”这一步时,无法查找到fishbot的相关话题(如图1所示),在上一步通信过程中,也看到了不断有数据提示,已经通信上了(如图2所示)。仍然出现这个问题,想请问应该如何解决?
-
@1020080005 用的udp协议吗,什么网络结构,通信质量怎么样
-
@小鱼 在 [FishBot教程] 3. 主控板固件烧录与配置 中说:
什么网络结构,通信质量怎么样
用的是udp协议,通信质量好。
多次查找后是用了“串口USB永久权限设置”这篇文章的代码得以解决,即:
sudo chmod 666 /dev/ttyUSB0
或者sudo usermod -aG dialoutwhoami -
此回复已被删除! -
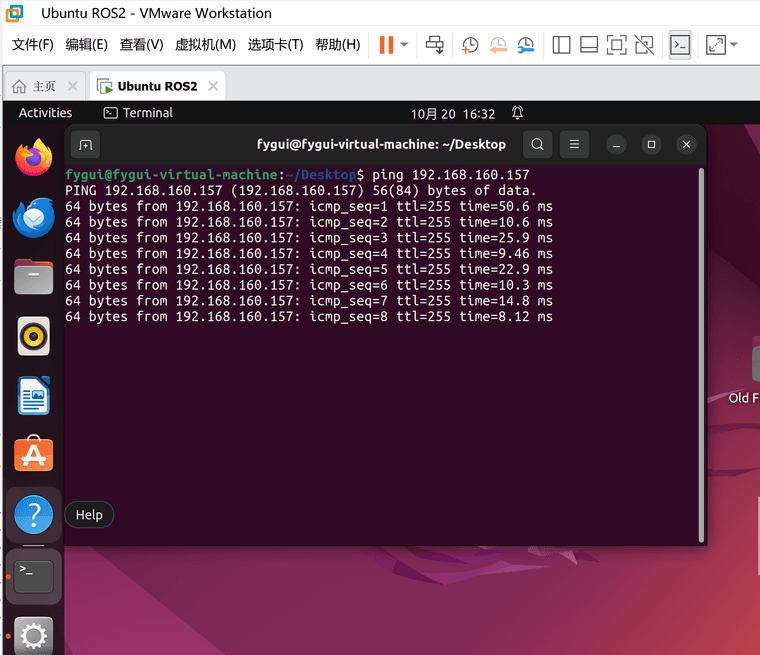
@小鱼 我在做教程3主板固件烧录与配置过程中,用Windows版本的配置助手成功烧录了运动控制板的固件并配置好了网络(手机热点,在宿舍条件有限,宿舍网线出口接路由器也是校园网)能ping通。在配置MicroRos服务时用虚拟机查看了网络IP配置了udpserver_ip,然后在虚拟机上执行了docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6后没有正常运行
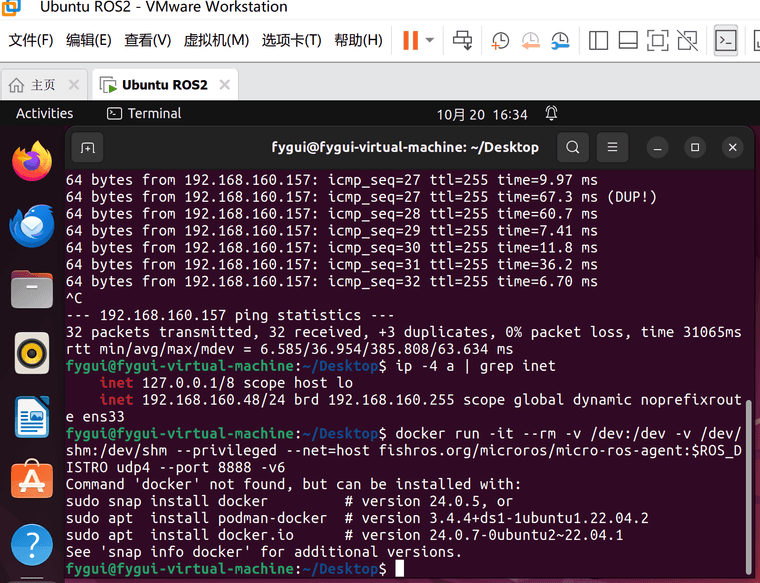
然后我又尝试了1.2节下载docker拉取镜像也没有成功
-
@小鱼 NVIDIA TX2 的烧录教程有么
-
@Songfuguide1 虚拟机要用桥接模式
-
此回复已被删除! -
小鱼您好,请问一下我用虚拟机无法读到串口怎么办?
-
@2290305520 虚拟机配置问题
-
@小鱼 在 [FishBot教程] 3. 主控板固件烧录与配置 中说:
但我们的计算机不一定在网络链路上就和fishbot能够打通,最简单的测试方式就是手动ping 一下fishbot的ip地址
-
 可以ping通但是microros服务无法接受数据
可以ping通但是microros服务无法接受数据 -
@1405286477 板子上显示什么,ping timeout 吗
-
@小鱼 是的,目前解决了,虚拟机网络需要改成桥接模式,就可以了。
-
 小 小鱼 在 中 引用了 这个主题
小 小鱼 在 中 引用了 这个主题
-
如果是需要用户认证的wifi如何进行配置?就是需要输入用户名和密码的
-
大佬,请问我小车板子上显示的是WiFi not found但下面有ssid和pwsd,请问一定不能用校园网吗,我因为在学校只有校园网和手机热点两种方式,有其他的替代方案吗?
-

能ping通 但链接失败 -
@1405286477 mark