[FishBot教程]9.0.7. FishBot-Nav2导航测试
-
想要换自己的雷达 需要怎么操作
-
@1250372262 重点在雷达转接板,雷达转接板可以实现串口转wifi转串口功能,配合代码:https://www.fishros.org.cn/forum/topic/949/拓展-雷达转接板的无线串口功能驱动代码
-
@小鱼 我是需要把原来的雷达替换成新雷达 然后把无线串口功能代码烧进板子里面 还是 无线串口功能代码是在电脑使用 直接把雷达换了 这一块不是很理解
-
@1250372262 雷达板原有的固件不用动,配置上面给的代码就可以实现转串口了
-
@小鱼 这个代码是要放在雷达板还是电脑上 我现在雷达是有驱动的 这个驱动能在ros2正常用,我这个雷达如果插到雷达板了 驱动也是不能正常用,要是插在电脑上 那车上还得放个电脑么
-
@1250372262 雷达接雷达板,雷达板有无线功能把数据传输到电脑,电脑上运行我给的代码,会在本地形成一个虚拟的串口号,使用你原来的雷达驱动设置目标串口号为虚拟串口号,这样一个流程
-
@小鱼 我把雷达链接到雷达板上面了 ,然后执行您给的代码,控制台输出
UART2SOCKET:8889->/tmp/fishbot_laser
Prepare to Accept connect!
然后我把代码中print(data) 注释解开了,发现没有数据打印,这个是正常的么,还是线接的有问题。雷达驱动启动提示成功,但是也是获取不到数据 /scan也没有数据输出 -
@1250372262 最有可能是网络问题,雷达板没有连到电脑,另外你用的是什么雷达,不同雷达启动方法不一样
-
@小鱼 刚开始确实网络有点问题 离路由器有点远了 后来我把小车给换个位置,用车上本身的雷达,启动程序可以正常打印一些数据内容,然后换上我的雷达,就没有打印了。我是n10镭神激光雷达,但是不管哪个雷达,用串口调试在电脑上都是可以正常看到数据。
-
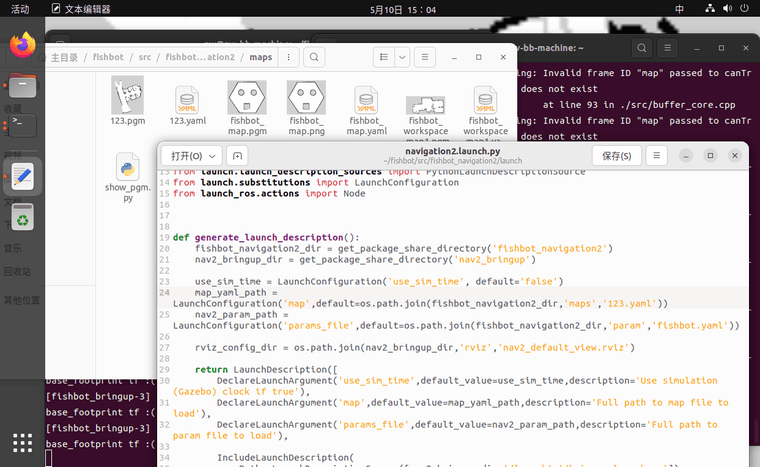
我想换的地图是123.yaml这个,但lanuch文件也改了,按照教程走,为什么rviz里出来的是另一个地图? -
@1762363551 救命,真的搞不出来,我也找了所有的navigation2.launch.py文件,把里面的map改成123.yaml,但这样还是不行。
-
@小鱼 有没有可能是雷达数据量太大了,我用串口助手起一个tcpserver 镭神这个雷达也是数据就出来一次 然后就断了 所以说这块可不可能您那块内存开辟的不够,这一块代码我没有找到。
-
@1762363551 要重新编译
-
@1250372262 这款雷达 没有测试过,有这个可能
-
@小鱼 那这块有什么解决的办法,这个雷达板的源代码有么,或者您这面改个大小 我重刷一下试试
-
@1250372262 源码在资料页面的最后
-
@小鱼 fishbot-laser-control 是这个代码么? 这个里面我没有具体找到哪一块是处理这个数据的,应该不太可能是test下面的。
-
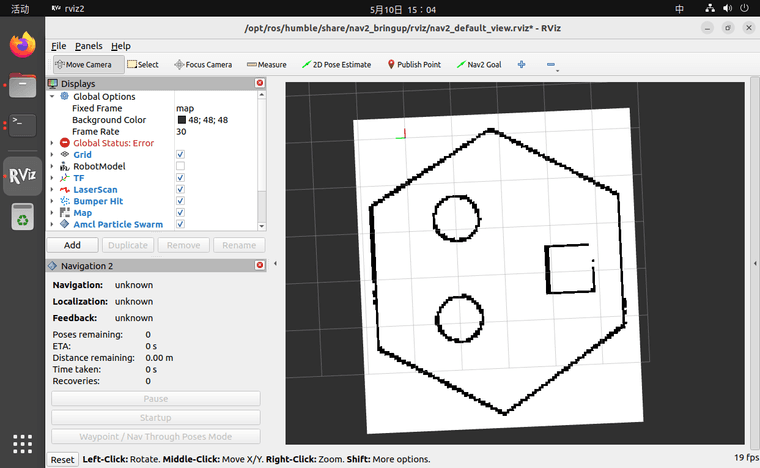
雷达好用了,建图都是没有问题的了 然后我按照导航测试那块 启动了fishbot_bringup 然后把地图换了,启动导航的时候地图能加载出来,但是点击2D Pose Estimate的时候,界面没有反应,不像之前那样了,并且也不能导航
-
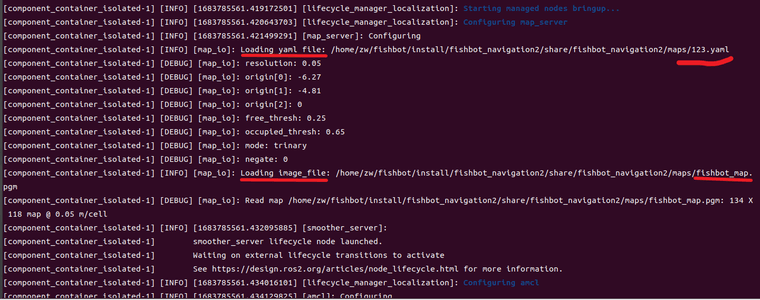
@小鱼 我到fishbot这个文件夹下colcon build编译了,但打开还是我上面那个地图,然后我看了看运行后客户端信息,应该是我标红的地方有问题,但我不知道怎么修改
-
@1762363551 贴一下yaml文件内容