oh……
闲来无事去catkin_make了一下,突然发现报错,说找不到头文件
于是在cmakelist里添加了
${GAZEBO_INCLUDE_DIRS}
确保能找到gazebo安装目录的头文件,然后编译通过再运行仿真环境就没问题了
oh……
闲来无事去catkin_make了一下,突然发现报错,说找不到头文件
于是在cmakelist里添加了
${GAZEBO_INCLUDE_DIRS}
确保能找到gazebo安装目录的头文件,然后编译通过再运行仿真环境就没问题了
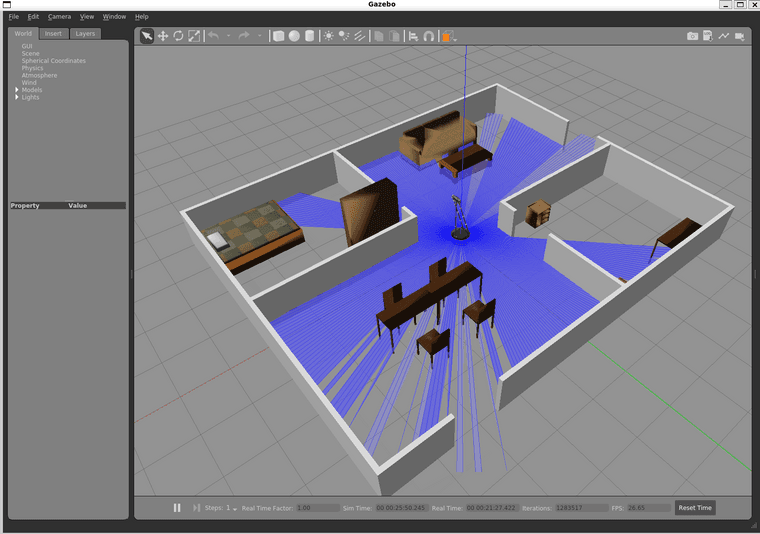
[我在尝试运行运行一个仿真环境学习move_base节点,用的是wpr_simulation这个项目的 wpb_stage_robocup.launch;定位是amcl,map已建图通过map_server发布,sensor是仿真机器人自带的/scan。原本用的是gazebo9,但是总是黑屏要运行多次才能成功就听建议换成了gazebo11,但是机器人自带的/odom好像没发布出来……]
-[原本用的是gazebo9,除了要多次运行才能正常加载之外没有别的问题。 但是总是黑屏要运行多次才能成功就听建议换成了gazebo11,之后机器人自带的/odom好像没发布出来……]
-[因为我对gazebo怎么仿真其实是0了解的,只是直接用了wpr_simulation里的一个环境而已,所以不知道怎么入手修改]
/amcl/parameter_descriptions
/amcl/parameter_updates
/amcl_pose
/clicked_point
/clock
/cmd_vel
/diagnostics
/gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/set_link_state
/gazebo/set_model_state
/imu/data
/initialpose
/joint_states
/kinect2/hd/camera_info
/kinect2/hd/image_color_rect
/kinect2/hd/image_color_rect/compressed
/kinect2/hd/image_color_rect/compressed/parameter_descriptions
/kinect2/hd/image_color_rect/compressed/parameter_updates
/kinect2/hd/image_color_rect/compressedDepth
/kinect2/hd/image_color_rect/compressedDepth/parameter_descriptions
/kinect2/hd/image_color_rect/compressedDepth/parameter_updates
/kinect2/hd/image_color_rect/theora
/kinect2/hd/image_color_rect/theora/parameter_descriptions
/kinect2/hd/image_color_rect/theora/parameter_updates
/kinect2/hd/parameter_descriptions
/kinect2/hd/parameter_updates
/kinect2/qhd/camera_info
/kinect2/qhd/image_color_rect
/kinect2/qhd/image_color_rect/compressed
/kinect2/qhd/image_color_rect/compressed/parameter_descriptions
/kinect2/qhd/image_color_rect/compressed/parameter_updates
/kinect2/qhd/image_color_rect/compressedDepth
/kinect2/qhd/image_color_rect/compressedDepth/parameter_descriptions
/kinect2/qhd/image_color_rect/compressedDepth/parameter_updates
/kinect2/qhd/image_color_rect/theora
/kinect2/qhd/image_color_rect/theora/parameter_descriptions
/kinect2/qhd/image_color_rect/theora/parameter_updates
/kinect2/qhd/parameter_descriptions
/kinect2/qhd/parameter_updates
/kinect2/qhd/points
/kinect2/sd/depth/camera_info
/kinect2/sd/depth_camera_info
/kinect2/sd/image_depth_rect
/kinect2/sd/image_ir_rect
/kinect2/sd/image_ir_rect/compressed
/kinect2/sd/image_ir_rect/compressed/parameter_descriptions
/kinect2/sd/image_ir_rect/compressed/parameter_updates
/kinect2/sd/image_ir_rect/compressedDepth
/kinect2/sd/image_ir_rect/compressedDepth/parameter_descriptions
/kinect2/sd/image_ir_rect/compressedDepth/parameter_updates
/kinect2/sd/image_ir_rect/theora
/kinect2/sd/image_ir_rect/theora/parameter_descriptions
/kinect2/sd/image_ir_rect/theora/parameter_updates
/kinect2/sd/parameter_descriptions
/kinect2/sd/parameter_updates
/kinect2/sd/points
/map
/map_metadata
/map_updates
/move_base/GlobalPlanner/plan
/move_base/current_goal
/move_base/global_costmap/costmap
/move_base/global_costmap/costmap_updates
/move_base/global_costmap/footprint
/move_base/goal
/move_base/local_costmap/costmap
/move_base/local_costmap/costmap_updates
/move_base_simple/goal
/particlecloud
/rosout
/rosout_agg
/scan
/scan_filtered
/tf
/tf_static
/visualization_marker
/visualization_marker_array
/waypoints_marker
/waypoints_marker_array